
pixhawkpro
Multicopter

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Multicopter
多旋翼无人机的形态设计已经多种多样,但新的结构形式仍在不断涌现。多旋翼无人机的新设计主要体现在无人机本身结构的设计,比如可折叠多旋翼无人机、全向多旋翼无人机等,也体现在无人机外部加装结构的设计,比如带机械臂多旋翼,还有多旋翼与固定翼的复合形态设计,比如垂直起降固定翼无人机、尾座式多旋翼无人机、升力翼多旋翼无人机,同样还有异构设计,比如双旋翼无人机、多栖多旋翼无人机。
1.1 笼式多旋翼无人机
为解决多旋翼无人机带来的安全性问题,设计者研发了笼式多旋翼,将多旋翼放置于一个笼式结构中,即使无人机在飞行过程中发生失误,由于有保护笼装置,可以有效降低人身伤害或螺旋桨损坏的风险。这种设计适用于检测发电厂的锅炉、大型压力容器、货仓液罐等密封、危险、无照明的空间。图1为瑞士Elios可碰撞无人机[1]。
图1 瑞士Elios可碰撞多旋翼无人机

1.2 可折叠多旋翼无人机
瑞士的苏黎世大学和研究组EPFL合作开发的自适应折叠无人机[2],遇到不同形状的空间或者洞口,可以改变旋翼臂与机身的角度来改变无人机的形状,以进入目的地。该型采用四个微处理器单独控制四个螺旋桨,可以实时适应臂的任何新位置,随着重心的移动调整螺旋桨的推力,始终保证稳定的飞行,如图2所示。
图2 可折叠无人机可变形状




1.3 全向多旋翼无人机
苏黎世联邦理工学院研发的全向多旋翼无人机原型采用了12个旋翼[3],而且每个都安装在可以360度旋转的机械臂上,保证这款无人机能够在空中随时调整飞行方向,实现全向飞行,如图3所示。全向无人机在实际场景较为广泛,由于它可以穿梭于一些比较窄小的缝隙中,在实际中常用于基础设施检查工作。
图3 全向多旋翼无人机

1.4 带机械臂多旋翼无人机
带机械臂多旋翼无人机是在无人机上加装可执行一定的动作、完成相应工作的无人机,这种无人机主要利用了多旋翼无人机动作灵活、飞行稳定和体型较小等优点,主要应用于高空高危等场所,以代替人工执行任务,也可以应用于人员不便工作的场所,减少人力投资,提高工作效率。美国SkyMul公司的SkyTy无人机[4]配有可移动的机械爪,可自动捆扎交叉的钢筋。技术人员还可使用半自动的界面来验证所放置钢筋的网格间距和安放精度,如图4所示。
图4 钢筋捆扎无人机

1.5 固定翼-多旋翼复合式无人机
复合式多旋翼无人机又称垂直起降固定翼无人机,这种无人机是在固定翼两侧机翼的前后方各安装一个螺旋桨(通常为4个),为无人机提供垂直起降所需升力,在机尾(图5)或机头(图6)部位安装推力或拉力螺旋桨,提供平飞巡航阶段的动力。在起飞阶段,两侧机翼的螺旋桨提供升力,使无人机垂直起飞;在平飞巡航阶段,推力或拉力螺旋桨启动,为无人机提供前飞动力,机翼两侧的螺旋桨将停转并固定在最小阻力位置,降低平飞阶段的阻力。复合式多旋翼无人机兼顾了多旋翼无人机的垂直起降性能与固定翼飞行器的平飞高效特性,降低了无人机对起降场地的要求,解决了多旋翼无人机续航时间不足的问题。
图 5 推力式垂起固定翼无人机[5]


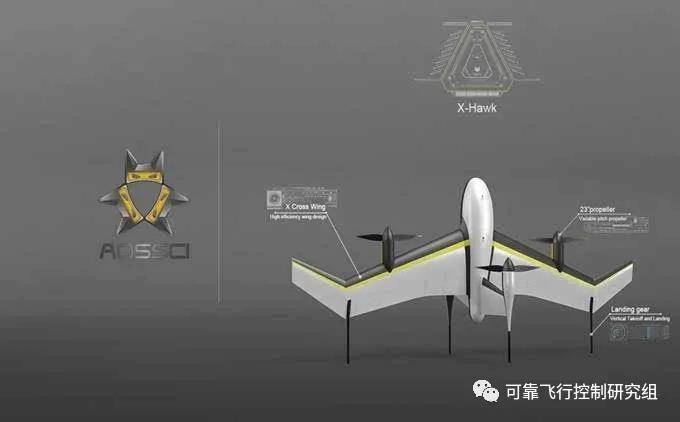
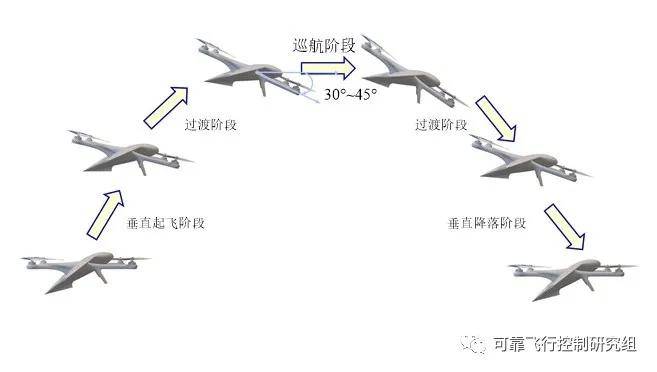
1.6 尾座式多旋翼无人机
尾座式多旋翼无人机是多旋翼与固定翼无人机的组合。 尾座式多旋翼无人机起飞时机头朝上,机身四周的多旋翼为无人机提供升力,待无人机起飞到预定高度,无人机改为机头向前平飞,此时多旋翼为无人机提供前飞动力。尾座式多旋翼无人机在起飞和巡航飞行时均使用同一套动力系统,没有多余的"死重",为无人机预留较多的有效载荷,同时在起飞时旋翼气流也不会与机翼相互干扰;其缺点也比较明显,在起飞和降落时,底部气流紊乱,副翼作用不明显,受侧向风影响较大,容易倾倒。
X-Hawk尾座式多旋翼无人机[7](图7)具备在狭小范围内垂直起降,长距离、长航时、全天候、复杂地形自主飞行等特点。
图 7 X-Hawk尾座式多旋翼无人机

1.7 升力翼多旋翼无人机
升力翼多旋翼无人机(图8)是一种翼身融合体与多旋翼的组合构型,旋翼桨盘平面与升力翼呈固定安装角度,在保留多旋翼原本简洁可靠的结构以及抗风稳定性的同时大幅度提高了前飞效率,它可以从悬停状态平滑地过渡到高效前飞状态,以此来达到最大的升力需求和动力最优配置。在前飞过程中,多旋翼可提供无人机的前飞动力和小部分升力,无人机的主要升力由机翼提供[8] ,如图9。
图 8 北航可靠飞行控制研究组的升力翼多旋翼无人机

1.8 双旋翼无人机
双旋翼无人机是在多旋翼的基础上发展而来的,采用旋翼倾转控制技术,可实现多种飞行动作,其结构简单、体积较小,续航时间长。由于采用倾转控制技术,其动力电机可在一定角度范围内旋转,传动结构较为复杂。Falcon矢量动力双旋翼无人机[9]采用全新的V型双旋翼动力系统(图10),可显著提高其续航能力和无人机的灵活性。
图 10 Falcon双旋翼无人机

1.9 多栖多旋翼无人机
多栖多旋翼无人机是多旋翼无人机深度发展的产物,它是无人机与车辆的融合,能够在空中飞行,也能像车辆一样在地面行走,或者在水中航行。
Robotic Research LLC的一款Pegasus
Mini可变形机器人[10](图11),它是无人机和陆地车辆组合,该系统具有先进的自主功能,支持在空中和地面模式下完全独立的操作。该款无人机用途包括营救、快速响应,石油和天然气,公共交通,执法公共安全等方面。
图 11 Pegasus Mini两栖无人机


