
pixhawkpro
Multicopter

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Multicopter
多旋翼的发展以进入成熟稳定期,但新技术的推陈出新有让人们对多旋翼提出了更高的要求,因此未来多旋翼的发展将呈现在动态平衡的过程中,主要体现在一下几个方面。
3.1 安全性
安全性正从硬件可靠性发展到软硬件适航性。目前要发展的载人飞行和城市中的货运无人机是当前强劲需求。多旋翼属于小型的复杂系统,应该从系统工程的角度设计保障飞行的安全。《系统工程2020年愿景》中,给出了“基于模型的系统工程(Model-Based Systems Engineering ,MBSE)”的定义:基于模型的系统工程是对系统工程活动中建模方法应用的正式认同,以使建模方法支持系统要求、设计、分析、验证和确认等活动,这些活动从概念性设计阶段开始,持续贯穿到设计开发以及后来的所有的寿命周期阶段。拟在利用先进的系统建模语言代替自然语言,从而消除不确定性、歧义性和不可计算性等。随着未来多旋翼无人机数量的增加,安全系数标准或适航标准必然成为一个准入门槛。
3.2 自主性
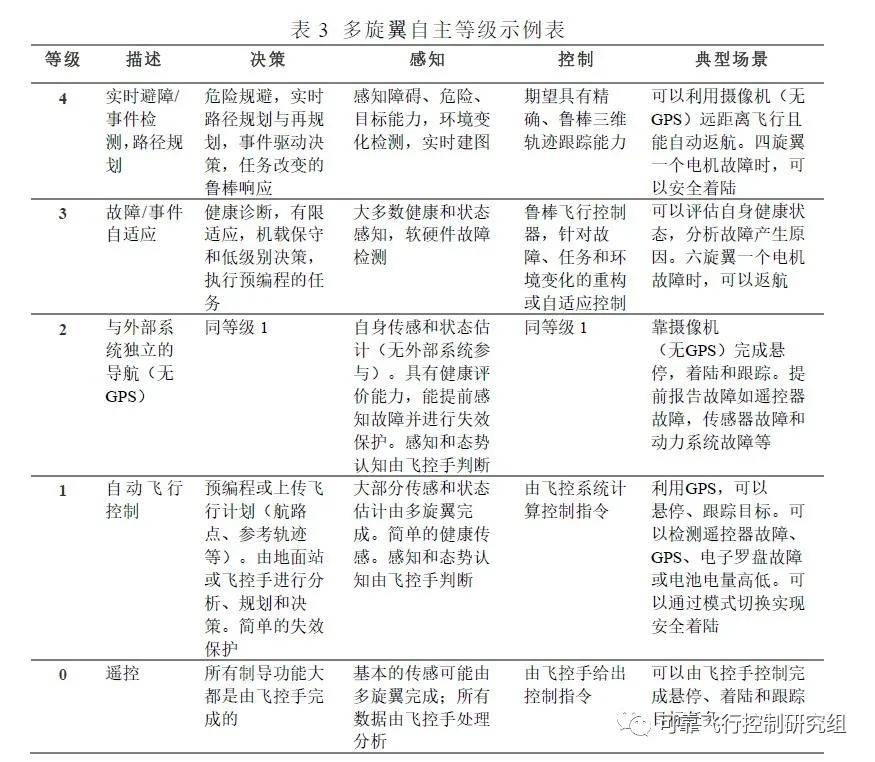
自主性集中体现在从程序控制发展到以视觉感知为主的自主智能控制。近年来,多旋翼无人机的视觉系统伴随着深度学习理论及机载计算芯片得到了极大的发展,主要从事识别、跟踪、环境地图感知、位置获取等等,极大地提高了无人机的自主能力。通过智能自主感知,使得多旋翼无人机可以在无卫星导航环境下跟踪物体以及躲避障碍物,提升安全性。如何界定多旋翼的自主性,目前没有统一的描述。这里给出了以下5个自主等级划分,如表3所示。
3.3 集群性
集群性集中在多人控制单机发展到单人控制多机。集群性是一种化整为零的问题解决思路,它极大提高了任务解决的可靠性和设备的维护性。集群无人系统可扩展性较强,根据任务的难易程度可以通过增减无人机数量来适配集群。此外集群性是另外一个维度降低操作人员负担,与此同时可以更高效完成给定的任务。少量操作人员可以控制无人机的数量是目前的几倍甚至数十倍。对于分布式自主集群来说,如何使得一群无人机像蚂蚁和蜜蜂一样协同工作,依然是目前科研人员研究的方向,这也必然成为未来的趋势。
3.4 有序性
有序性体现在个体无序飞行到有序飞行的交通管控。大量无序飞行的低空无人机会对地面设施、公共安全、空中载人飞行器等带来危害。交通管控是通过对整个低空的无人机运行安全和风险进行评估,同时对低空的无人机进行有效的规划,保证它们合理有序的飞行,从而促进无人机行业的健康发展。然而,民航空中交通管理不能适应未来数以百万架的无人机。为了适应新的特点,世界各国针对低空无人机空中交通管理开发了新框架。包括美国的无人机系统交通管理框架UTM(Unmanned Aircraft System Traffic Management),欧盟委员会和欧洲航空安全局(EASA)提出建立公共无人机飞行系统U-Space以及中国的无人机运行管理(UAS Operation Management, UOM)系统。无人机交通管理技术的研发与落地,不仅能够满足不断增长的无人机行业应用需求,亦可作为有人机自动化演进的重要技术途径,实现中国航空业的快速发展,成为世界各国进入航空强国的重要途径。
3.5多样性
多样性体现在从单一形态的多旋翼无人机发展到多功能多形态的多旋翼无人机,适应不同的应用需求。通过不断地改变多旋翼形态,可以克服目前多旋翼无人机的诸多不便。另外,不断深挖应用需求,通过配置不同载荷,满足不同需求。随着移动终端的兴起,芯片、电池、惯性传感器、通信芯片等产业链迅速成熟,成本下降,使载荷迅速向更加小型化、低功耗的设备迈进。这也给无人机多样性创造了更多的条件。多样化的另外的一个条件是载荷和接口的标准化,这一块一直得到了各国的重视。美国发布了《Standardization Roadmap for Unmanned Aircraft System》,以及中国发布了《GB/T 38058-2019 民用多旋翼无人机系统试验方法》等标准。标准的推出可以更好地分解系统,使得分系统达到精益求精。因此,多样化和标准化趋势也促使从业者需要用于创新,在分系统质量上或者针对需求的方案设计上能够做到领先。需求的多样化必将促进多旋翼无人机发展的多样化。
