
pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
CC3D飞控运行iNAV用于固定翼导航
iNAV起源于cleanflight,其目的是更好的支持自主导航飞行功能。 CC3D使用基于ARM的STM32F1处理器,几乎是当前最便宜的32位飞控了。它板载MPU6000姿态传感器和EEPROM存储,不带气压计和罗盘。好在iNAV的固定翼导航功能恰恰不需要气压计和罗盘,因此你只要用CC3D和一个能用的GPS模块,就可以搭建一个包含基本辅助飞行、自动回家和预设航点飞行的固定翼飞控。 ......
【2024-01-02】 详细内容
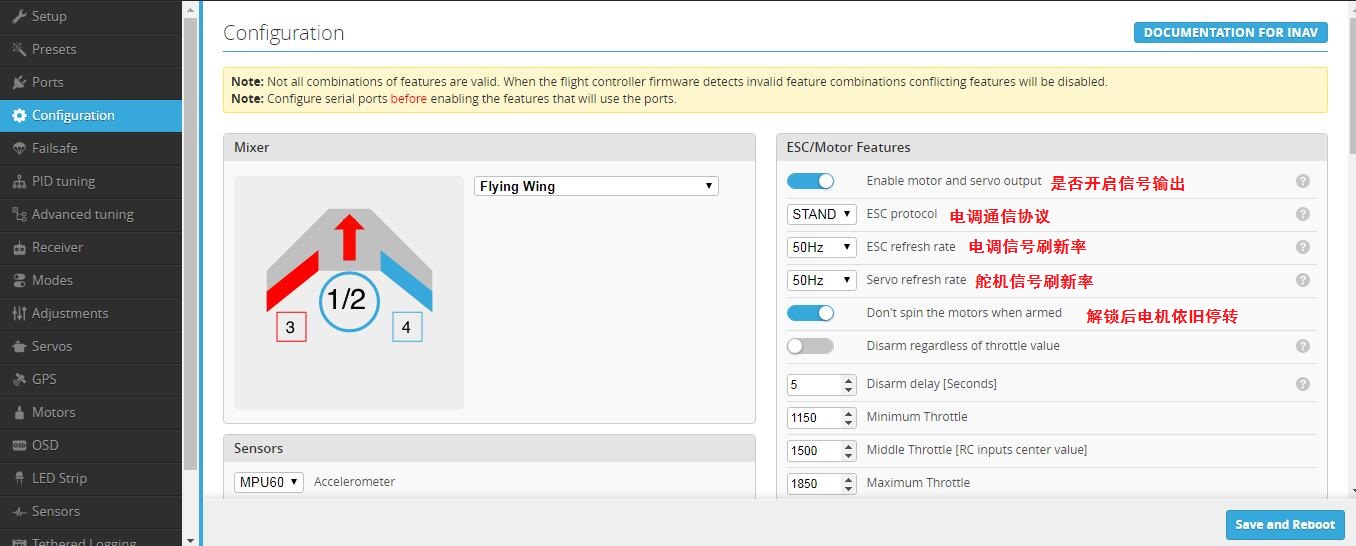
固定翼上使用iNav(inavflight)的基本步骤
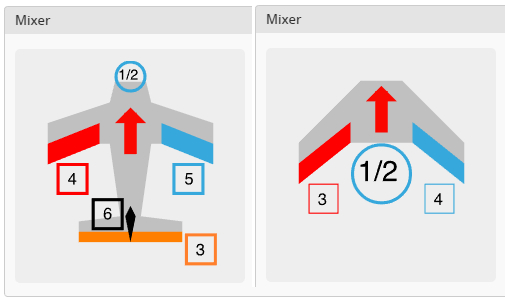
注意:使用1.6版本以下(inav/cleanflight/betaflight)固件的F3飞控或相同处理器的飞控,飞行时间不能超过1小时15分钟,1.6以上无此限制。 1):飞控准备 用iNav配置软件(地面站)刷写最新固件;对所有传感器校准,这一步不能少;在预设菜单项中选择匹配的预设机型。 2)舵机/电机飞控的连接 下图是飞机(左边),固定翼(右边)的舵机/电机位置图,舵机和电调/电机(记住:舵机的正极请接BEC不要接飞控,飞控带不起)飞机1号位 电机......
【2023-12-31】 详细内容
