pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
 |
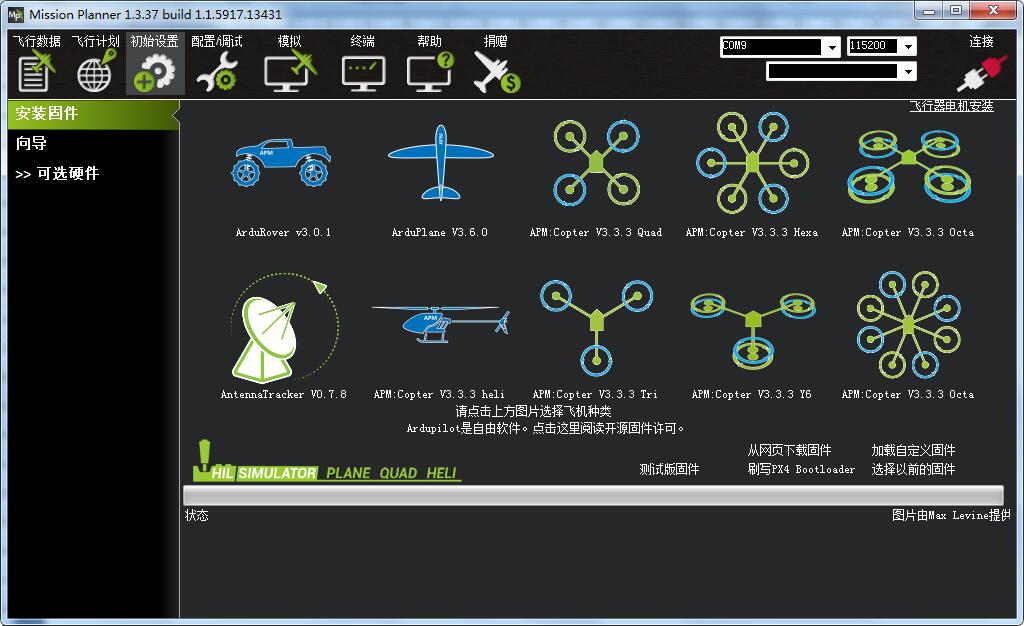
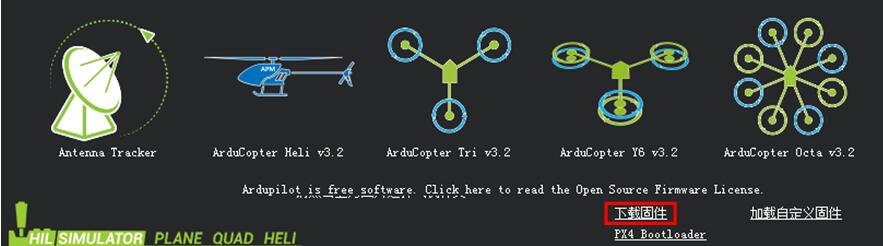
选择:初始设置->安装固件
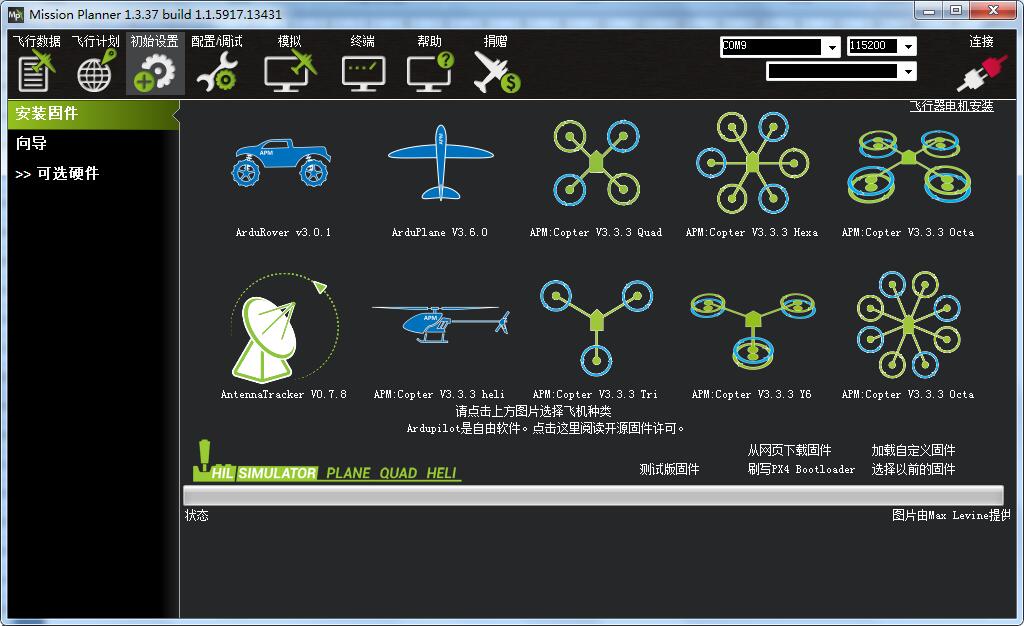
选择
表示下载四轴最新固件,弹出是否继续对话框,选择“是”,等待安装完成,会出现短暂的音乐声。
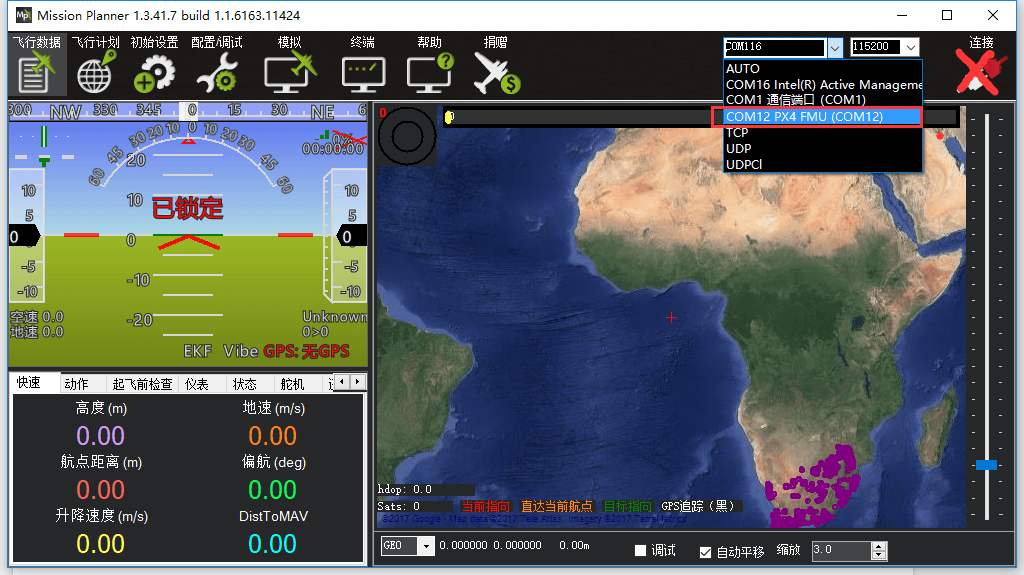
进入“飞行数据”页面,右上角选择PX4所在的COM端口(本机为COM9)和115200波特率,点击右上角“连接”图标即可连上飞控,获取飞控数据:

通过地面站安装固件页面中的“下载固件”按钮打开官方下载服务器。
官方软件下载地址:
http://firmware.ardupilot.org/
选择固件Firmware中的APM Copter (多旋翼和传统直升机固件)
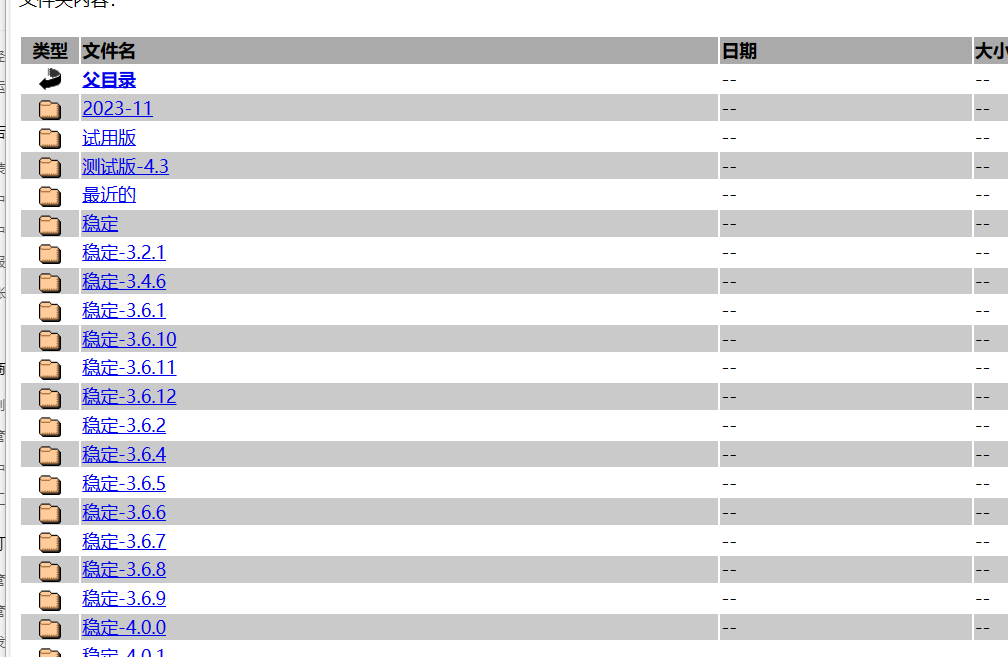
打开固件下载页面:建议使用稳定版,点击stable,进入稳定版下载(网址):
http://firmware.ardupilot.org/Copter/stable/
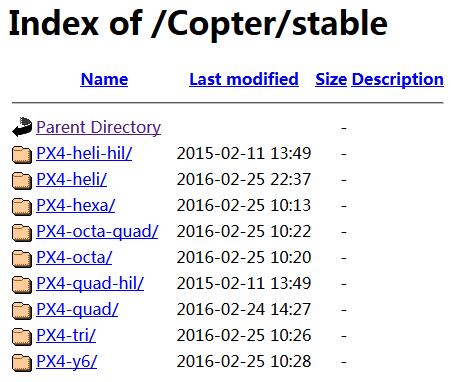
PX4对应我们的飞控。文件名简单意思是:
heli表示直升机
hexa表示6轴
octa表示8轴
octa-quad表示4个机壁,上下两层供8台马达的8轴
quad表示4轴(我们要用的)
tri表示3轴
点击PX4-quad/进入下载页面:选择v2.px4版本,右键->将链接另存为,下载到本机。
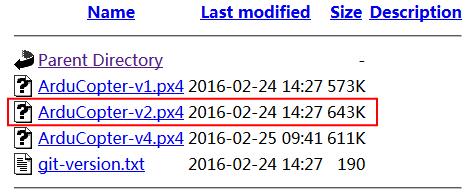
如果要加载自定义固件,在地面站进入“初始设置”页面->加载自定义固件->弹出对话框选择刚下载的固件文件确定即可
地面站切换到“飞行数据”页面,设置好端口与波特率后,选择右上角连接连接图标即可看到飞控数据(高度、角度等)传回地面站并显示出来。此时主LED灯黄灯闪烁,LED红蓝闪烁表示自检。
最新固件:
参考: