pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
 |
Pixhawk开源飞控是3DR硬件厂商推出的开源飞控硬件平台。
国内很多生产厂商都是按照pixhawk原版的设计生产Pixhawk开源飞控硬件平台,包括Pixhawk系列产品采用相同的硬件设计及全进口芯片,使其生产出来的pixhawk开源飞控硬件平台具有相当高的稳定性。
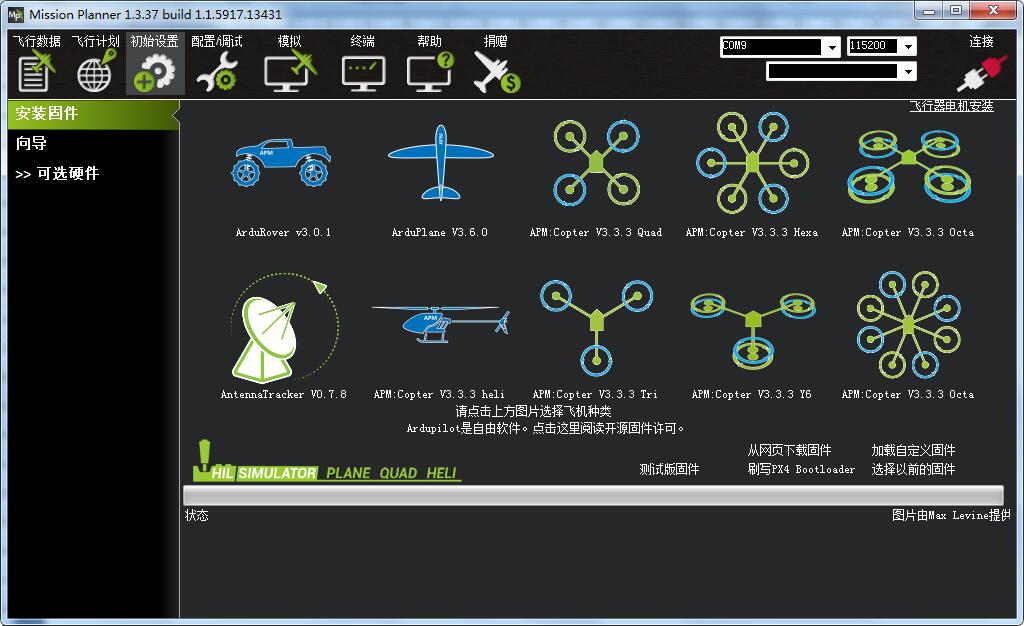
Pixhawk开源飞控可运行 PX4 及 APM 固件环境,我们这里主要讲解APM 固件环境的调试。PX4 及 APM 固件环境在基本构架上是不同的,但表现形式的差不多,我们讲解一种,另外一种还是能理解的。固件支持的机型包括:固定翼、多旋翼(3-8 旋翼)、直升机、垂直起降无人机 VTOL、无人车、无人船等机型。
基于 STM32F427(180MHZ)主控及 STM32F100 协处理器。
内置 2组 IMU 冗余设计(包括 2 组加速计、2组陀螺仪、1组电子罗盘、1组数字气压计)
支持 3 组电源供电冗余切换
软件内建传感器数据融合机制及故障切换机制,将由飞控引起的坠机几率大大降低。
可扩展 1 组电子罗盘、2 组 NMEA 或者 UBX 标准 GPS、CAN 总线设备(电调)、2 路 I2C 设备(智能电池、状态灯、光流智能相机、激光传感器、超声波传感器等)

| 硬件参数 | |
|---|---|
| 主处理器Processor | STM32F427 |
| 协处理器Failsafe co-processor | STM32F100 |
| 传感器 | |
| 加速器Accelerometer *2 | LS303D\MPU6000 |
| 陀螺仪Gyro*2 | L3GD20\MPU6000 |
| 电子罗盘Compass *1 | LS303D |
| 气压计Barometer *1 | MS5611 |
| 接口 | |
| Mavlink UART串口 | 2(带硬件流控) |
| GPS UART串口 | 2 |
| DEBUG UART串口 | 1 |
| 遥控器信号输入协议 | PPM/SBUS/DSM/DSM2 |
| RSSI输入 | PWM或3.3模拟电压 |
| I2C | 2 |
| CAN标准总线 | 1 |
| ADC输入 | 3.3V X1 , 6.6V X1 |
| PWM输出 | 标准8 PWM IO + 6个可编程IO |
| 支持机型 | |
| 固定翼/3-8旋翼/直升机/VTOL垂直起降/无人机/无人船 | |
| 工作环境及物理参数 | |
| PM工作电压 | 4.5 ~ 5.5 V |
| USB电压 | 5.0 V +- 0.25v |
| Servo电压 | 4.8~5.4V |
| 工作温度 | -10 ~ 60°c |
| 尺寸 | |
| 长X宽X高 | 68*44*17 |
| 重量 | 63g |