
pixhawkpro
Multicopter

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Multicopter
遥控系统包括遥控发射,跟遥控接收。遥控发射是地基远程控制单元,需要操作员来命令飞行器。遥控接收机收到指令传给飞控, 飞控指定飞机的运动(例如,速度、方向、油门、偏航、俯仰和横滚等)。也可以切换自驾仪的飞行模式(例如,起飞、着陆、返航、任务等)。 带有遥测功能的遥控系统,接收机也可以回传显示飞机的信息(例如,电池电量、飞行模式)。

遥控系统的一个重要质量指标是它支持多少个通道。 通道的数量是由它可以发送指令到飞机的物理控制的数量决定。
一个飞行器最少支持4个通道(横滚、俯仰、偏航、油门)。 地面设备最少需要两个通道(转向和油门)。 8或16通道的遥控器可以提供额外的通道,用来控制其他机械结构或激活自驾仪上不同的飞行模式。
无人机最受欢迎的遥控器形式如下所示。 横滚/俯仰和油门/偏航的控制分别布置在摇杆上(飞行器最少需要4个通道)。
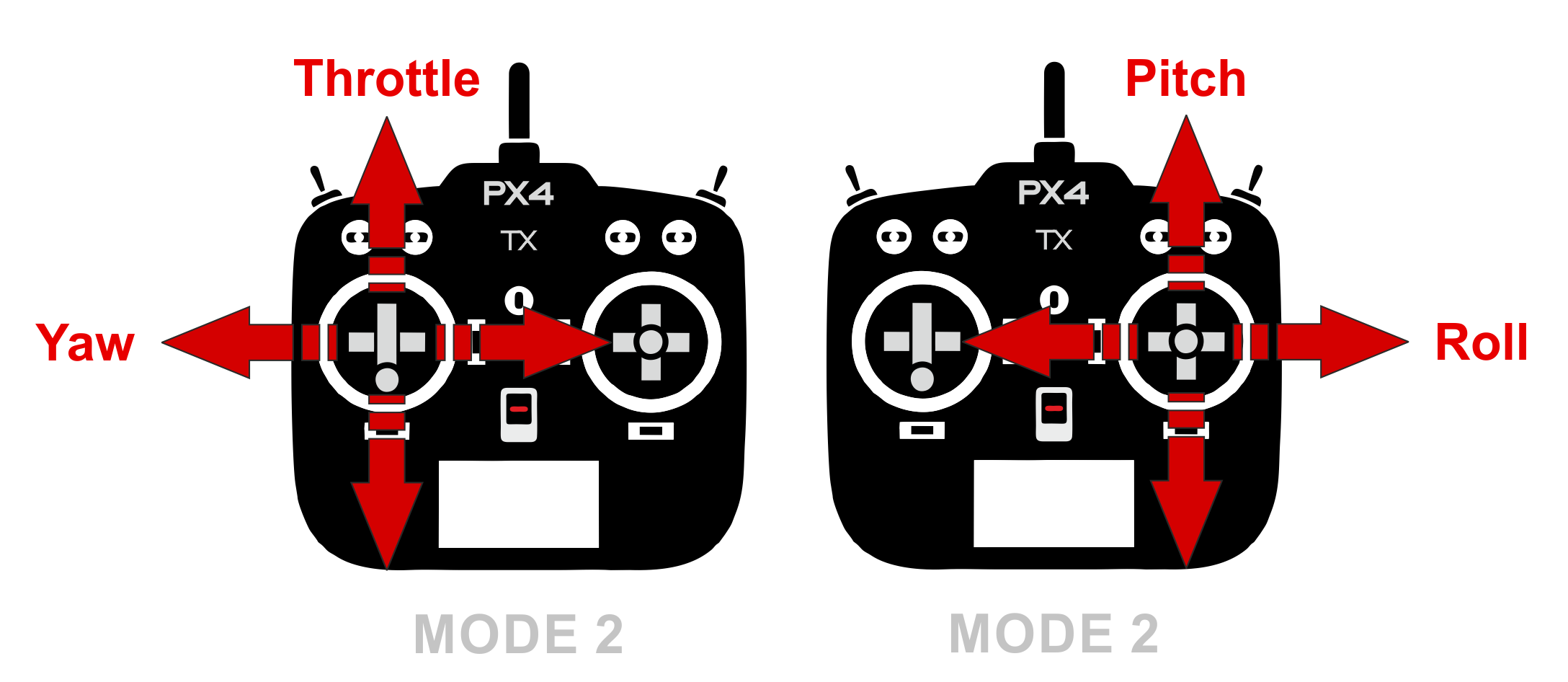
遥控器上的通道分为摇杆、开关、旋扭等有许多可能的布局。 最常用的布局被给予了特定的“模式”号。 日本手和美国手只在油门的位置有差别。
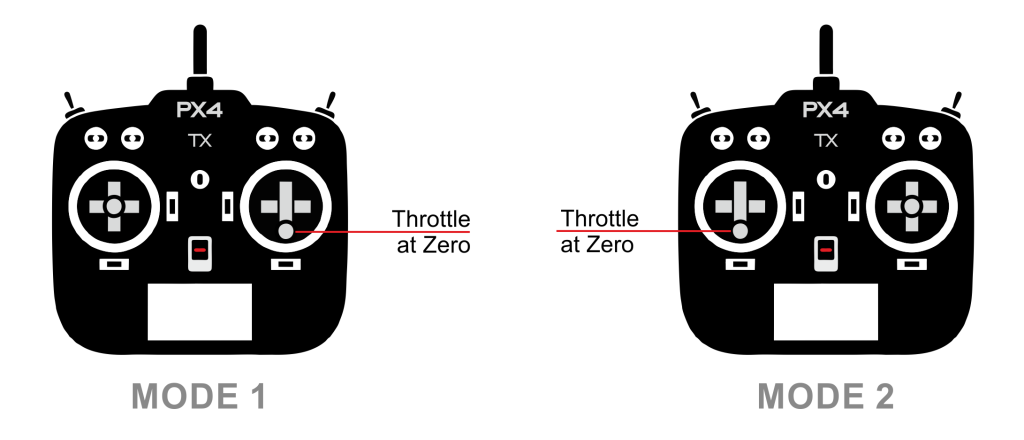
选择什么模式看你的喜好( 美国手更受欢迎点)。
你需要选择互相兼容的成对发射机/接收机。 另外,接收机必须兼容 PX4和飞行控制器硬件。
遥控器,接收机,通常一起销售。 例如,FrSky Taranis X9D 和 FrSky X8R是一个受欢迎的选择。
另外接收机和发射机需要兼容,接收机也必须和 PX4 和其他控制硬件兼容。
PX4 和 Pixhawk兼容的接收机如下所示:
另外,接收机连接到飞控还需要合适的波特率。
特定遥控器的连接可以查阅下面提供的快速指南。
相关信息可以查阅遥控器制造商提供的说明书。
在你校准和/使用无线系统之前,你需要先将接收机和发射机对频,好让他们之间进行通信。 各种遥控器的对频方法各不相同(参照遥控器说明书)。
如果你使用 Spektrum 的接收机,你可以使用 QGroundControl 的遥控器设置 > 对频 进行对频.
