pixhawkpro
Multicopter

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Multicopter
PX4自驾仪软件系统使用传感器来确定飞行器状态(自稳和飞行器状态,或启用自主控制所需的信号数据)。 飞行器状态包括:位置/高度,航向,速度,空速,方向(姿态),不同方向的旋转速率,电池电量等。
传感器系统最低要求 陀螺仪,加速度计,磁力计(罗盘)和气压计。 需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。 固定翼和 VTOL 飞行器还应包括空速传感器。
陀螺仪,加速度计,磁力计(罗盘)和气压计传感器组合集成在 Pixhawk 系列 飞控上(并且也能存在其他飞控平台上)。 附加/外部传感器则用电线连接到控制器。
下面我们介绍一些传感器。 最后有链接到关于 传感器接线 的信息。
内部传感器,机体运动状态感知。
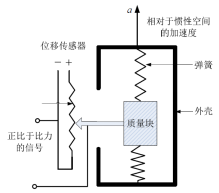
l 加速度计
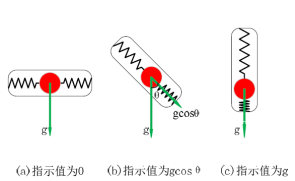
加速度计是用来提供无人机在XYZ三轴方向所承受的加速力。它也能决定无人机在静止状态时的倾斜角度。当加速度计保持静止时,加速度计能够感知重力加速度,而整体加速度为零;倾斜时,XYZ轴均施以0到1G之间的输出,相关数值可应用于三角公式,让无人机达到特定倾斜角度。
加速度计同时也用来提供水平及垂直方向的线性加速。相关数据可作为计算速率、方向,甚至是无人机高度的变化率。
l 陀螺仪
陀螺仪能监测三轴的角速度,因此可计算出俯仰(pitch)、翻滚(roll)和偏航(yaw)时角度的变化率,而角度信息的变化可以用来维持无人机稳定并防止晃动。
l 磁罗盘
磁罗盘测量的物理量是地球磁场强度沿机体轴的分量,并依此计算出机体的航向角。它能提供无人机在XYZ各轴向所承受磁场的数据,然后用这些信息来计算地理方位。
为了提高计算结果的精度,有时还需要通过加速度计提供的倾斜角度数据来补偿修正。
气压计传感器
外置传感器 GPS&罗盘
PX4自驾仪软件系统 支持许多全球导航卫星系统(GNSS)接收器和罗盘(磁力计)。 它还支持 实时动态(RTK)GPS接收器 ,它将 GPS 系统扩展到厘米级精度。
Pixhawk 系列 控制器包括 内置 罗盘。 这对于大型飞行器(例如 VTOL ) 可能 是有用的,其中可以通过远离电源线安装Pixhawk 来减少电磁干扰。 在小型飞行器上,几乎总是需要外置罗盘。
我们建议使用安装在尽可能远离 电机/电调 电源线的外部“组合” 罗盘 / GPS 模块 - 通常在支座或机翼(固定翼)上。
常见的 GPS/罗盘硬件选项列于:GPS/罗盘。

距离传感器用于精确着陆、物体躲避和地形跟随。
PX4支持许多价格合理的距离传感器,使用不同的技术,并支持不同的范围和功能。有关更多信息,请参阅:距离传感器。

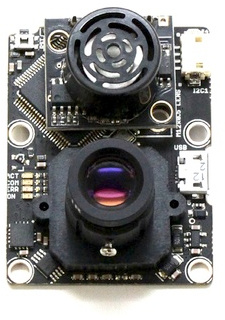
Some options include:
B. 外部环境状态感知
1)毫米波雷达
毫米波雷达系统是一种主动探测设备,利用电磁波的反射来检测障碍物,该电磁回波中包含有障碍物目标方向大小、相对距离等信息,并具有探测范围广、全天候、全天时工作的特点,然而雷达系统通常体积、功耗较大,无法适用于中小型无人机系统,且目标精确识别能力有限。
(2)激光雷达
激光雷达是利用时间飞行原理来测量距离的一种仪器,激光扫描测量系统基于激光测距原理。通过旋转的光学部件发射形成二维的扫描面,以实现区域扫描及轮廓测量功能,并且生成所在空间的平面点云图信息从而用于地图测绘、机器人定位导航、环境建模等应用。
激光传感器具有精度高、单向性好等优点,但成本较高。通过机载激光感知系统可以快速得到准确的目标方位、速度、形状等参数。激光传感器不易受气流影响,但易受到烟雾、灰尘和雨滴的干扰。目前,在无人机感知与避障系统中都有一定的应用。


(3)深度相机
深度相机的本质是光电传感器的应用,采用光电元件将目标场景的光信号转化为电信号,具有被动无源的特点,且所获取的图像中含有丰富的细节消息,是当前无人机目标感知与规避系统应用较多的一种感知设备。优点是作用距离远、分辨率高、隐蔽性好,但缺点是无法全天候、全天时工作,且对光线较为敏感,在强光或弱光环境下会影响数据精度。


C. 传感器数据融合
不同类型的传感器数据融合方法有多种,当前在业内使用比较普遍而且效果也比较好的是EKF,也就是扩展卡尔曼滤波。以计算飞机姿态角的融合方法为例,EKF更新过程主要分为两个部分,预测更新和量测更新。
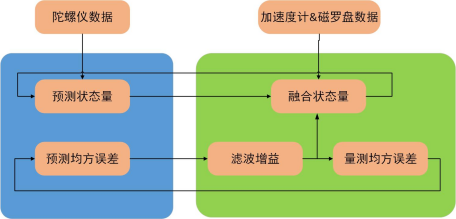
预测更新主要利用陀螺仪更新预测状态量,同时计算该状态量的协方差矩阵。在量测更新中先会计算滤波增益,然后使用滤波增益融合预测状态量、加速度计以及磁罗盘的数据,成为一个融合状态量,同时计算融合状态量的协方差矩阵,在下一次更新周期的计算中使用。
固定翼常用
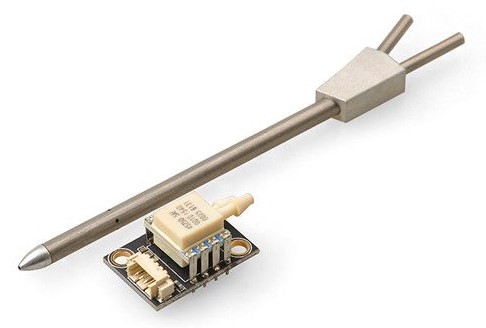
空速计
对于固定翼和 VTOL 机架,强烈建议 使用空速传感器。
它们非常重要,因为自驾仪没有其他方法来检测失速。 对于固定翼飞行来说,保证升力的是空速而不是地速。