
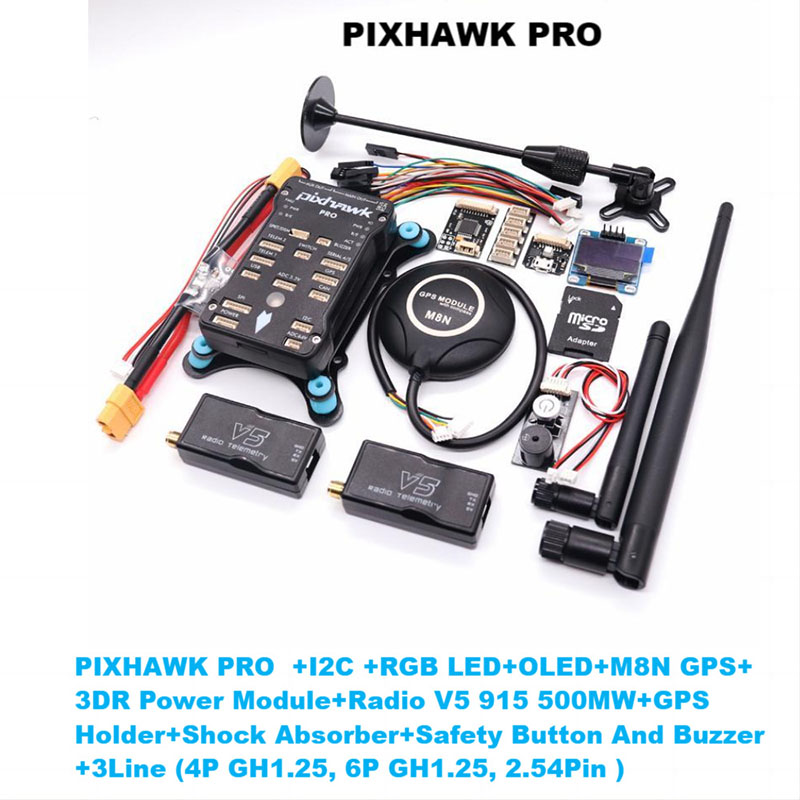
pixhawkpro
Multicopter

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Multicopter
开源飞控硬件平台的发展 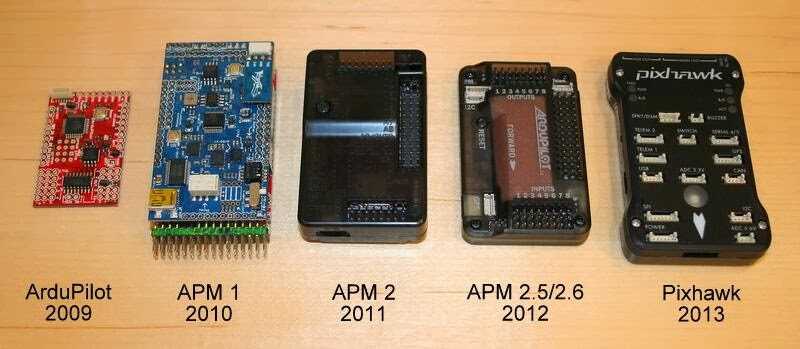
Pixhawk飞控是硬件平台,
在选择飞控板时你应当考虑 飞机的物理尺寸限制、需要的功能以及必不可少的成本。
开源飞控软件平台的发展
而PX4和APM都是开源的可以烧写到Pixhawk飞控中的自驾仪软件。除了PX4这款自驾仪软件,还有一种飞行协议栈(或称自驾仪软件)可以被烧写到Pixhawk飞控,那就是非常流行ArduPilot或称为APM的自驾仪软件。PX4和APM是两套最成熟先进的无人机软件系统,PX4由苏黎世理工大学(ETH)的科研团队研发并开放,而APM则是累积了几年来众多开发者和发烧玩家的代码贡献,逐渐成熟起来 。
我们这里组装无人机比较常用的是
Pixhawk飞控是硬件平台,加ArduPilot或称为APM的自驾仪软件平台
PX4固件 能够在很多飞控板上运行软件!我们推荐用Pixhawk RPO飞控硬件平台!
2,用于计算密集型任务的无人机
这些飞行控制器(和开发平台)提供机载“协同计算”,以实现计算机视觉和其他计算密集型任务。
| 控制器 | 描述 |
|---|---|
| Raspberry Pi 2/3 Navio2 | 树莓派可以连接到自动驾驶仪并用作机载计算机。 |
所谓无人机的飞控,就是无人机的飞行控制系统。
无人机飞控能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行,是无人机的大脑。
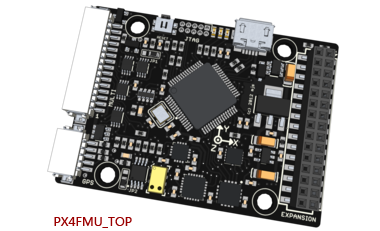
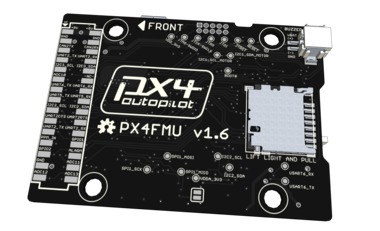
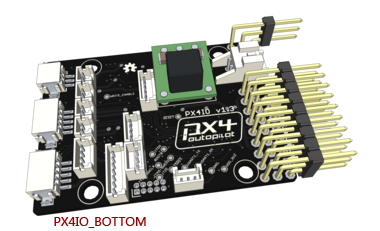
Pixhawk是第一款专门为PX4自驾软件而设计的无人机飞控。第一个版本的Pixhawk被命名为Pixhawk v1,也被称作FMUv1,它包含PX4FMU和PX4IO两部分。
PX4FMU是Pixhawk v1飞控的核心控制部分,主要负责姿态解算等等算法的执行;PX4IO主要负责飞控各外设接口的管理。
PX4FMU
PX4IO

继FMUv1飞控之后,第二代飞控被称为Pixhawk v2或FMUv2。
在FMUv2这个版本飞控中,第一代中的PX4FMU和PX4IO被合并到了一个PCB上,成为了真正的一体化飞控。

Pixhawk v2.4.5 Pixhawk v2.4.8是Pixhawk v2的子版本。
第三代 Pixhawk PRO
Pixhawk飞控是开源硬件架构,所以全世界很多公司出品了基于Pixhawk的飞控产品。他们都有共同的硬件架构和相同的连接方式、输出接口及功能,仅仅是具体形式不同而已,例如接口的位置不同、外壳不同等等。
下面是一些衍生的Pixhawk控制器。



无人机毕竟只是飞行平台,在飞行过程中,通常有很多的如图像分析、避障以及许多的在线服务和系统集成等任务需要处理。
在骁龙飞控诞生之前,通常是使用树莓派之类的微处理器与飞控协同工作,这种通常的集成方式有时很繁琐,对于普通用户而言很难成功实现。
高通公司解决了这个集成难的问题,并且真正地实现了把用于处理多任务的微处理器和飞控处理器集成到了一块电路板上。
这款飞控拥有四核CPU、一个功能的GPU以及很多的摄像头和传感器。它可以在使用PX4自驾仪软件控制飞行器飞行的同时,还可以作为微机处理很多额外的任务。
