pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
 |
安装pixhawk驱动程序(或使用网购时店家提供)
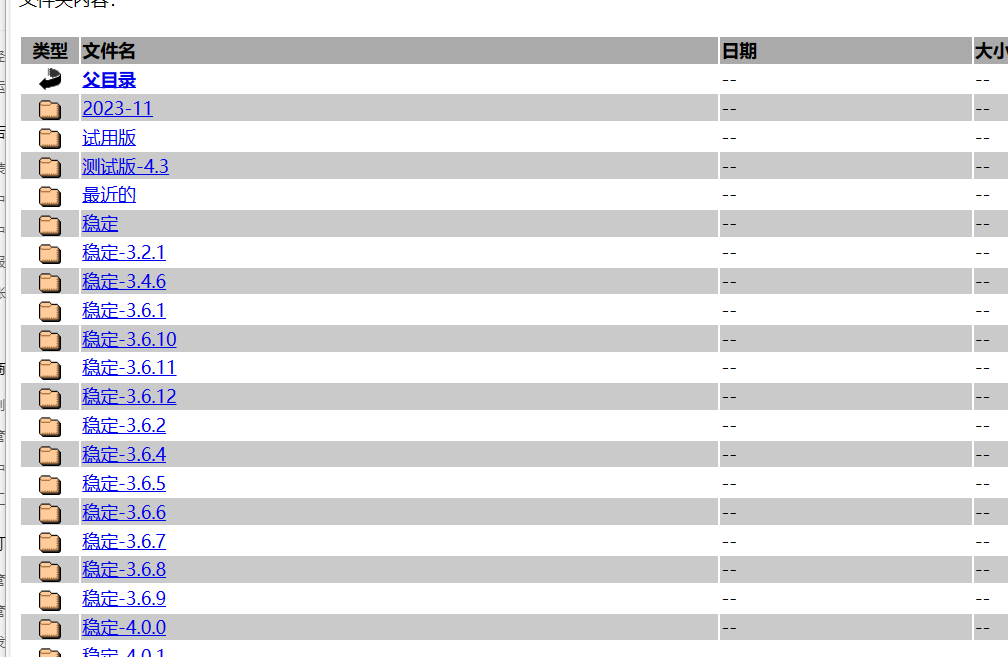
https://pixhawk.org/firmware/downloads
下载地址
本系列教程所用的客户端是1.3.62版本,其界面可能与最新版有所出入,但总体差别不大
操作步骤
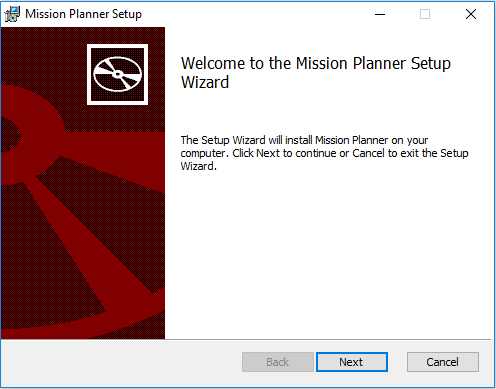
一直点击next,按照说明完成安装
如果您收到DirectX安装错误,请到Windows下载中心下载对应的DirectX插件更新
如果收到以下警告,请选择Install this driver software anyway以继续

C:\Program Files (x86)\Mission Planner 或 C:\ Program Files \ APM Planner 文件夹下
软件更新
注意:有时候你一直使用稳定地使用当前Mission Planner版本,则不建议更新
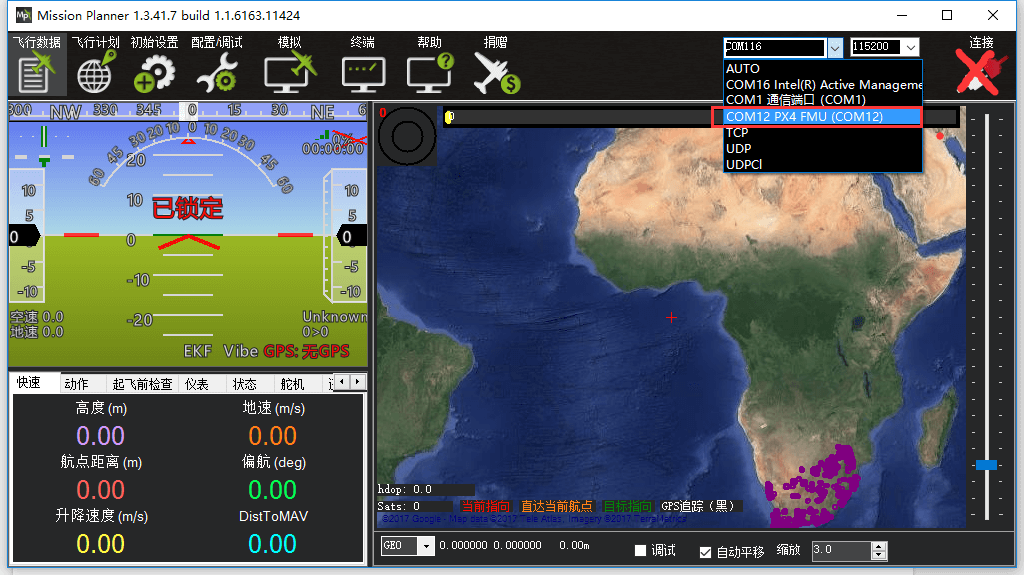
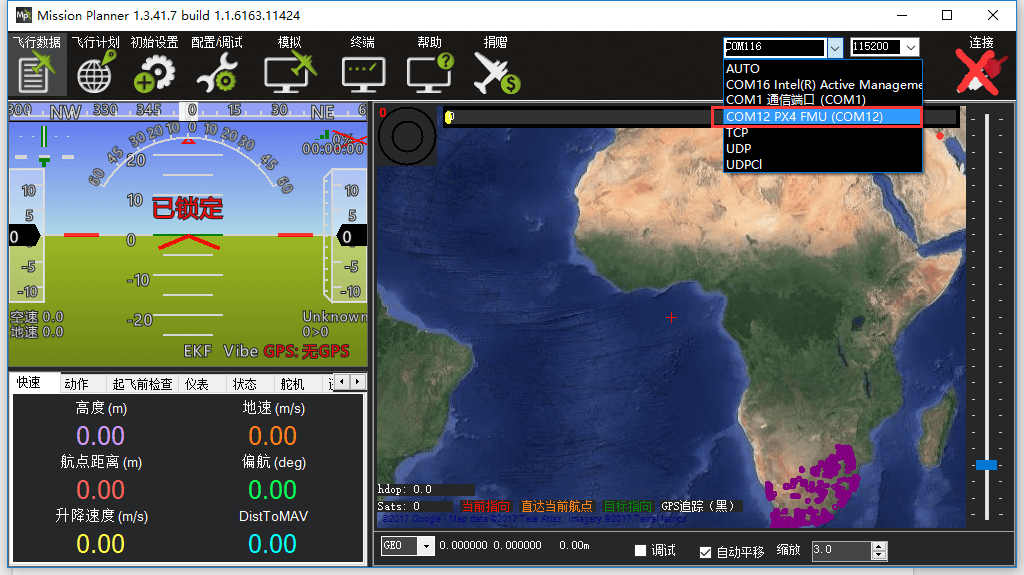
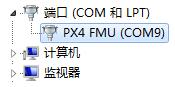
计算机->右键->设备管理器->端口,出现PX4端口
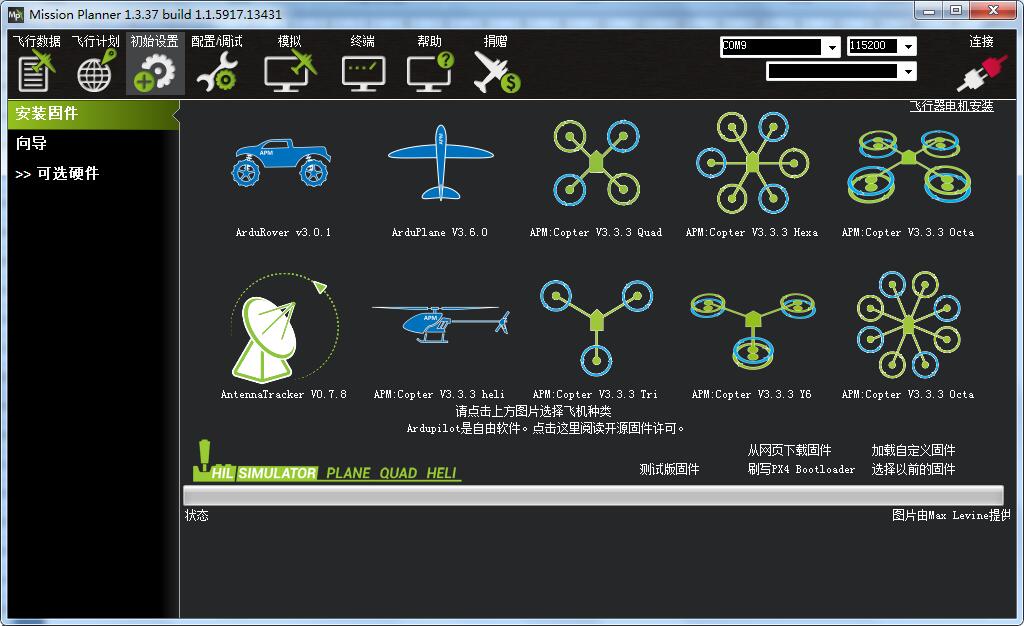
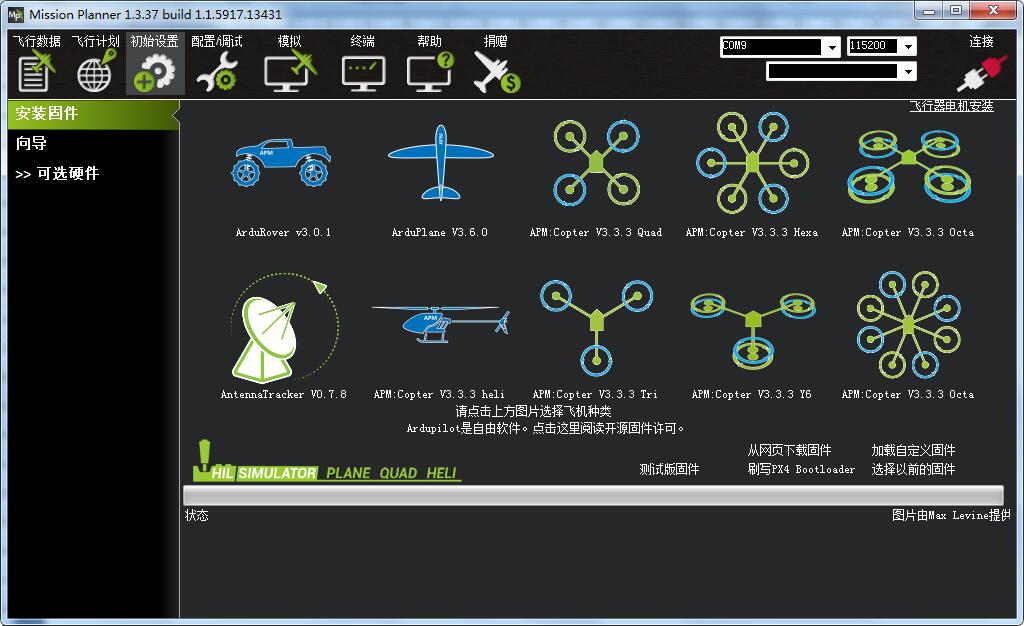
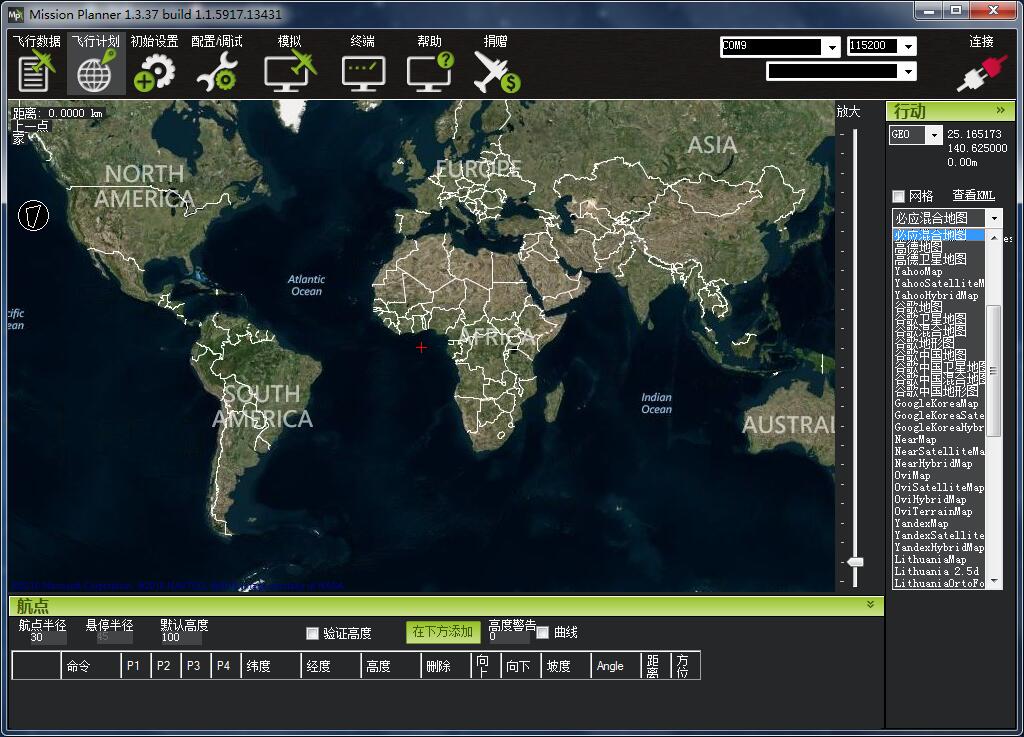
安装地面站软件(MissionPlanner,MP)本机安装版本v1.3.37

地图加载方法:飞行计划->右侧地图下拉菜单->必应混合地图
介绍:
参考:
开发链接:
代码风格: