pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
 |
Ardupilot 软件在环SITL仿真不仅可以使用MAVProxy地面站,也可以使用图形化界面更完善的Mission PLanner地面站。
Ardupilot开发环境的配置以及软件在环SITL仿真可见之前的文章:
Ardupilot开发环境搭建(Ubuntu18.04,20190407)
ArduPilot 软件在环仿真SITL(SITL+MAVProxy)
上次文章中介绍了基于SITL和MAVProxy地面站的仿真,主要是通过加载飞行计划的方式进行飞行控制的,但没有对飞行计划文件进行详细说明,所以本文首先介绍飞行计划文件。
飞行计划文件本质就是存储一系列有序迹点(Waypoints)的普通文本文件。在自动飞行模式下仿真时会读取此文件,并按照迹点控制飞行。

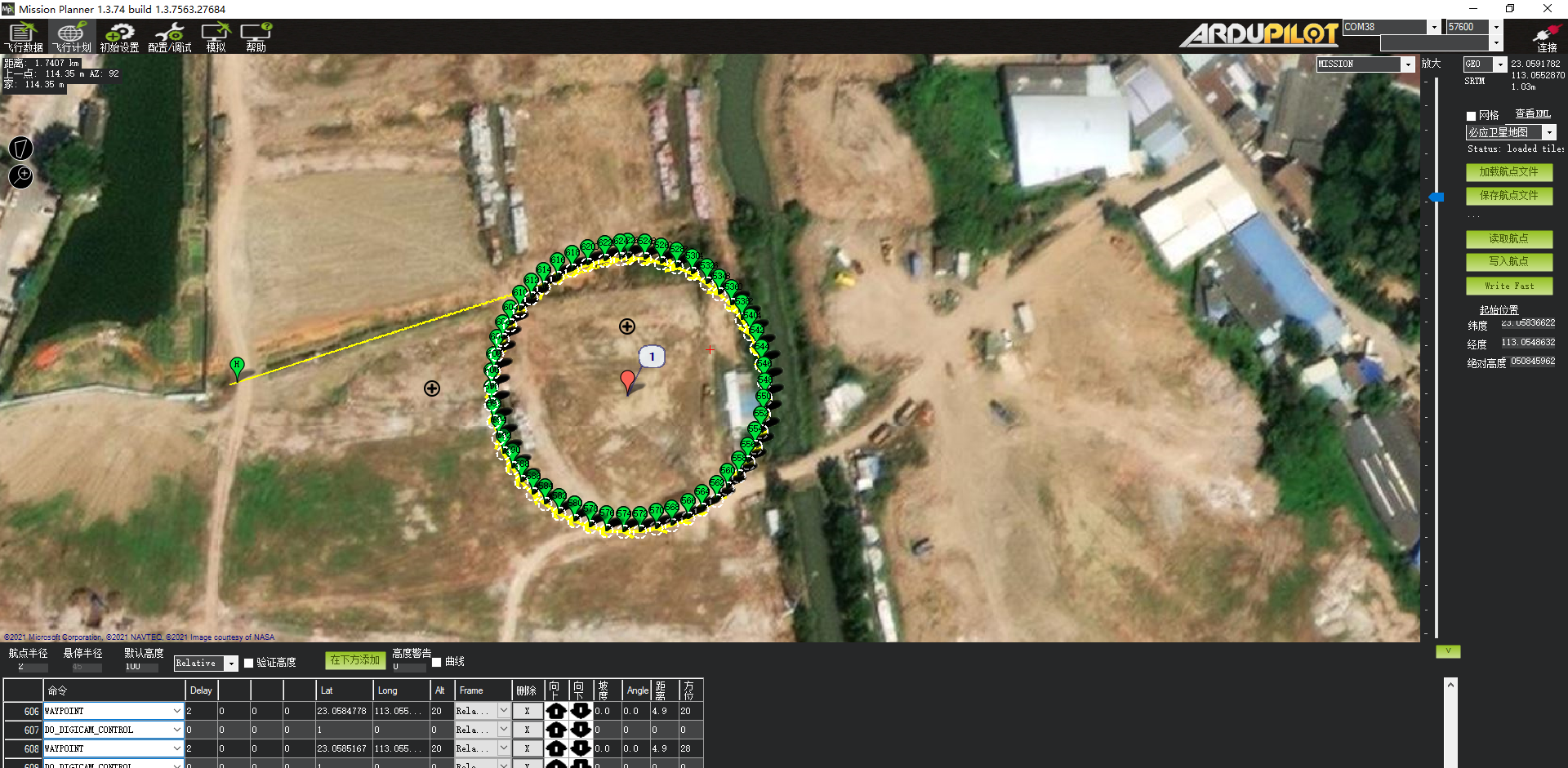
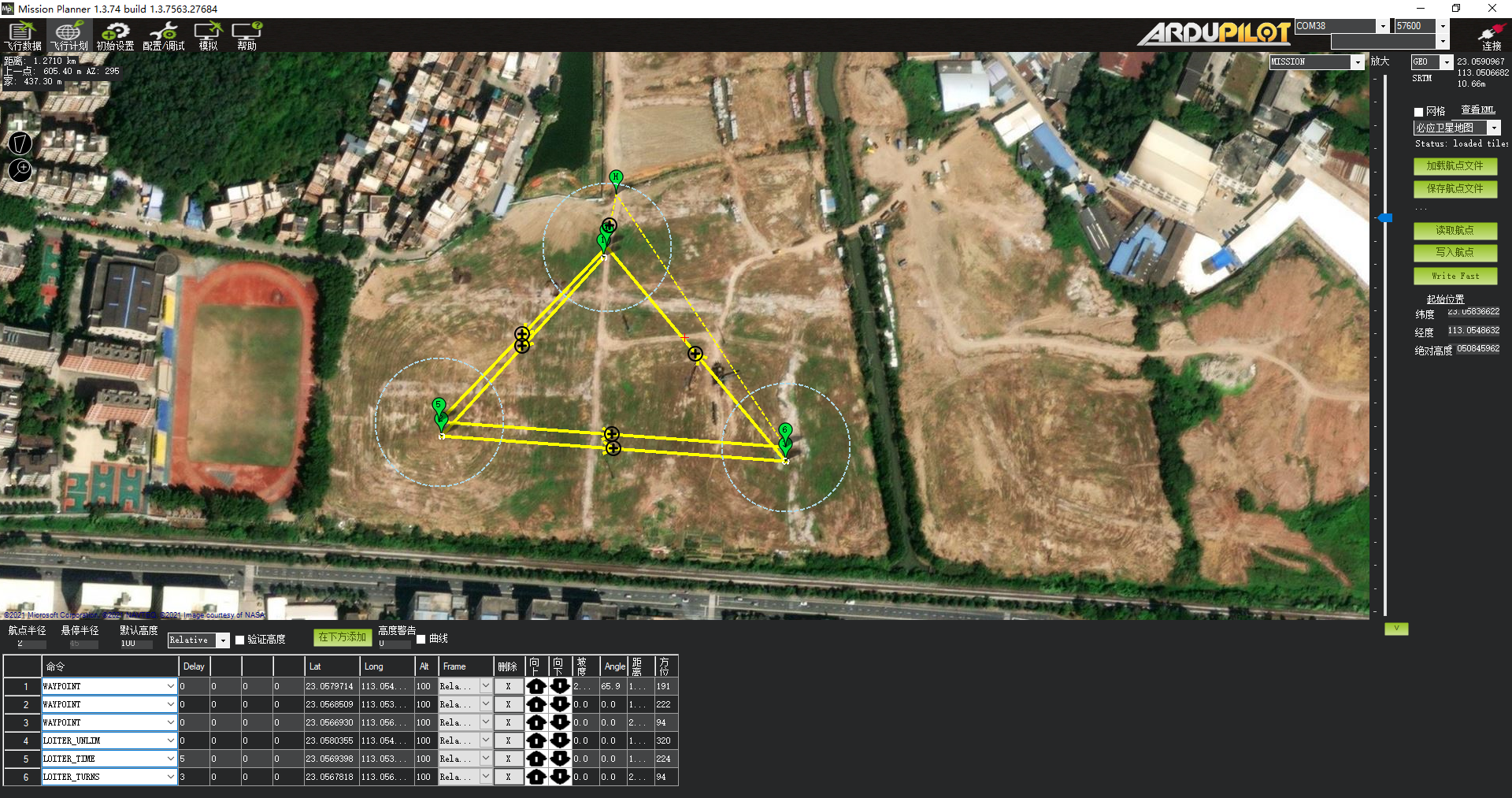
上述说明已经Waypoints文件的构成方式,但也能看出如果自行编辑此文件还是有一定难度的,所以下面说明如何通过Mission Planner地面站以图形化的方式生成Waypoints文件。

选中飞行计划选项卡后,可以通过在地图上点击的方式增加迹点,通过下拉菜单可以选择迹点类型(命令),并且配置类型相关参数,坐标XYZ会自动生成,最后可以通过右侧的保存航点文件来生成Waypoints文件。上图是我生成一个简单例子。
首先还是通过下述语句进入软件在环仿真环境,
cd ~/ardupilot/ArduCopter
sim_vehicle.py --map --console之后可以通过output语句列出MAVProxy转发数据的接口
MANUAL> output
MANUAL> 2 outputs
0: 127.0.0.1:14550
1: 127.0.0.1:14551上面的列表说明我们可以通过上述接口连接MAVProxy和Mission Planner。如果需要更多接口可以通过下述命令增加接口。
MANUAL> output add 192.168.126.1:14552
MANUAL> Adding output 192.168.126.1:14552
MANUAL> output
MANUAL> 3 outputs
0: 127.0.0.1:14550
1: 127.0.0.1:14551
2: 192.168.126.254:14552如果Mission Planner与MAVProxy在同一台机器上可以通过UDP直接连接。
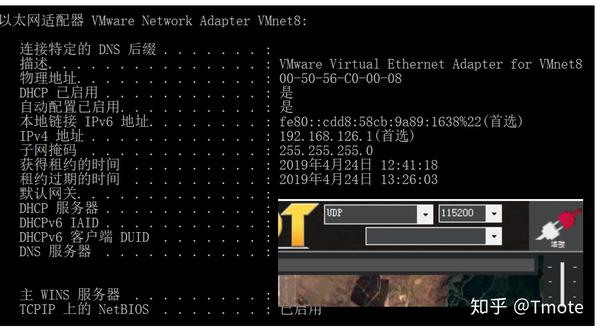
若是Ardupilot的开发环境建立在虚拟机中,而Mission Planner运行在windows,需要设定一下网络链路首先获取虚拟机连接模式所用的虚拟网卡地址。下述实验使用的虚拟机网络模式为NAT模式,对应的虚拟网卡为VMnet8。使用ipconfig /all 可以查询到IPv4地址为192.168.126.1。通过 output add 192.168.126.1:14552增加此网络链路,之后可以通过此链路(127.0.0.1:14552)来连接Mission Planner与MAVProxy。
当Mission Planner与MAVProxy建立好连接之后,就可以运行仿真命令开始软件在环仿真。
MANUAL> wp load ../Tools/autotest/CMAC-circuit.txt
MANUAL> Loaded 8 waypoints from ../Tools/autotest/CMAC-circuit.txt
MANUAL> mode guided
MANUAL> GUIDED>
GUIDED> arm throttle
GUIDED> takeoff 40
GUIDED> Take Off started
GUIDED> mode auto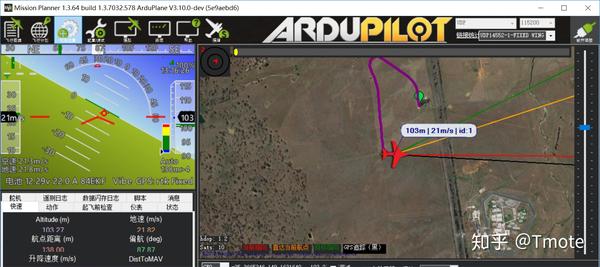
仿真时可以在Mission Planner中看到飞机飞行姿态、飞行轨迹、舵机输出、遥测日志等等。