pixhawkpro

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Product center



浏览次数:369
发表日期:2023-10-29
产品摘要:
步骤: 打开MissionPlanner 点击菜单栏飞行计划 点击鼠标右键,选择集结点,设定集结点 集结点的属性 Altitude:指定集合点的悬停高度,集合点......
上一个: 航点规划-航点命令
下一个: 航点规划-Loiter留待
产品价格:步骤:
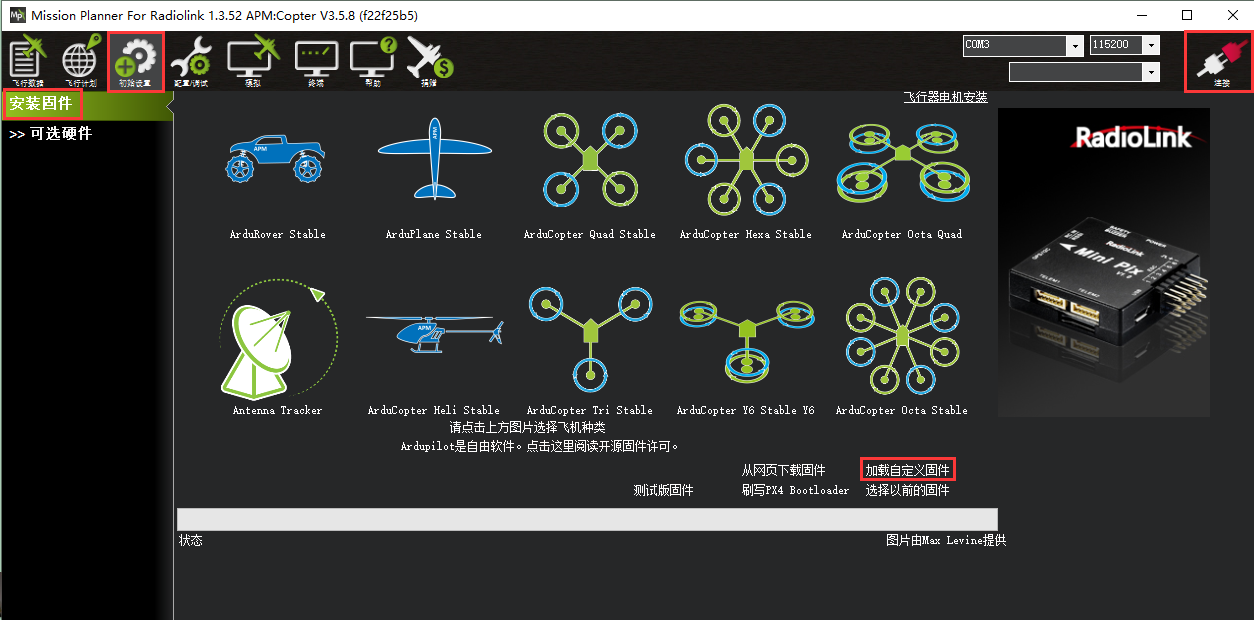
打开MissionPlanner
点击菜单栏飞行计划
点击鼠标右键,选择集结点,设定集结点
集结点的属性
Altitude:指定集合点的悬停高度,集合点的默认高度是航点高度
点击鼠标右键,选择集结点,上传,把集合点上传到飞控