详细介绍:
一、加载固件
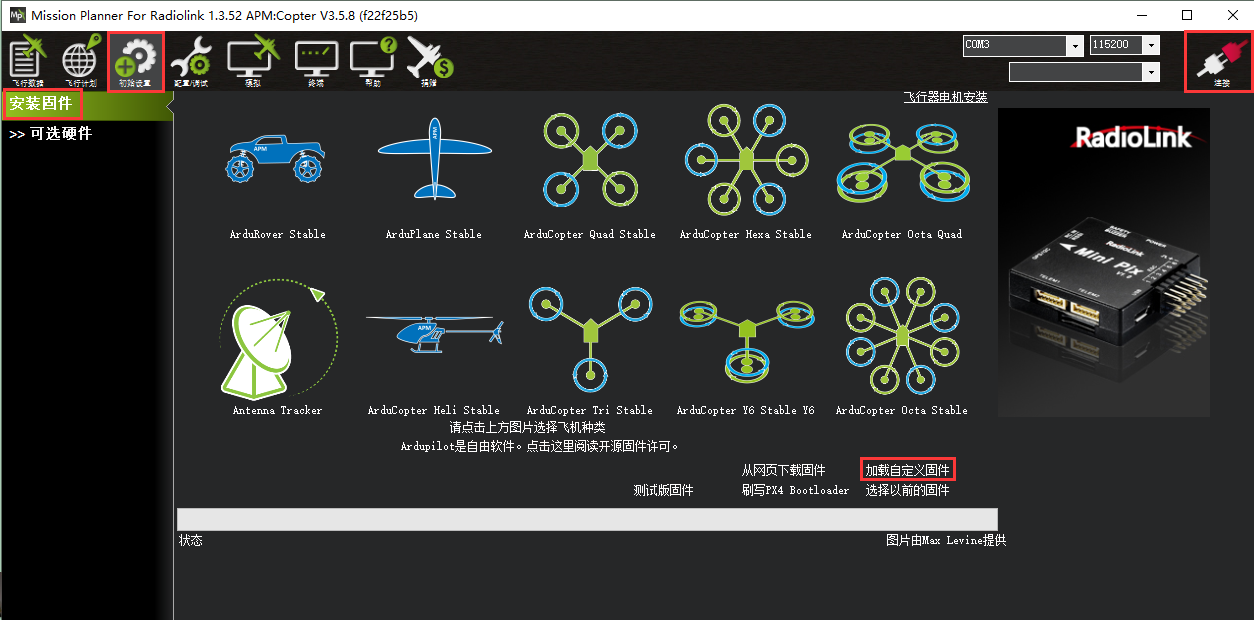
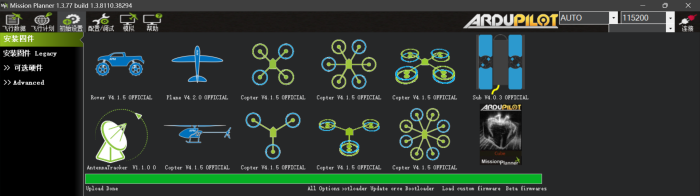
首先我们打开Mission Planner地面站软件,用micro USB数据线将无人机飞控和PC连接起来。进入地面站的“初始设置”界面,选择“安装固件”选项,加载我们事先准备好的自定义固件。

载入固件文件后,根据弹出的窗口提示,先断开飞控与PC的连接,然后点击“OK”后再重新将飞控与PC进行连接。
当PC识别到飞控后,地面站开始将固件加载到飞控。当进度条满格并出现“Upload Done”字样,同时飞控伴随出现一段音效提示,说明此时固件已经成功加载到飞控。
二、飞控连接
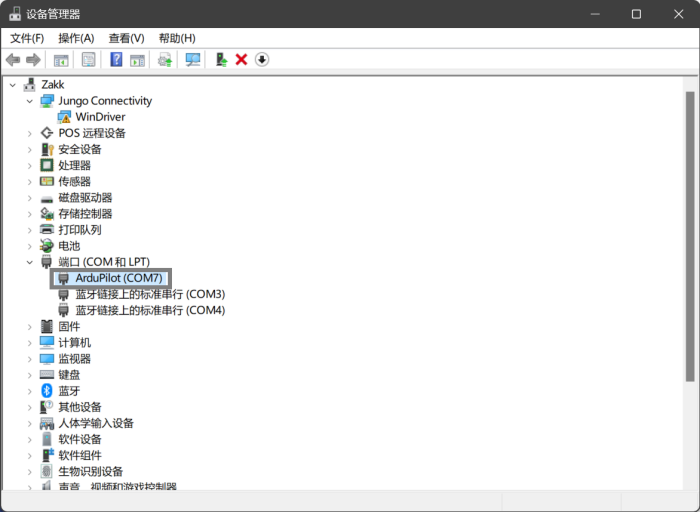
打开Windows下的“设备管理器”,查看与PC连接的飞控的端口号,在地面站软件上选择相同的飞控端口并连接。
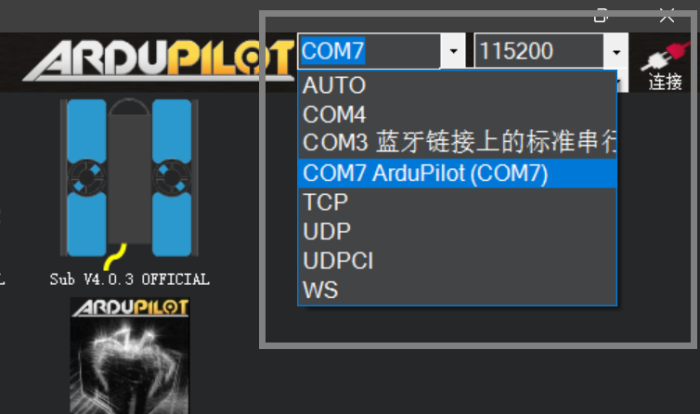
弹出固件更新的提示框,是因为先前从本地载入的固件版本为4.1.0,软件提示当前有最新版本的固件可用,可以直接忽略该提示。这里就完成了飞控与PC地面站的连接。
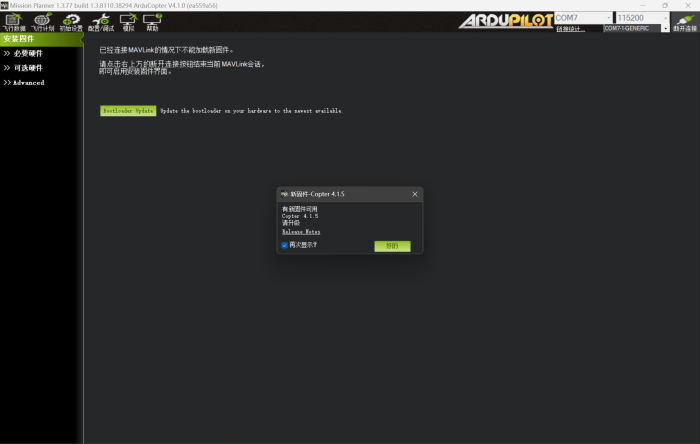
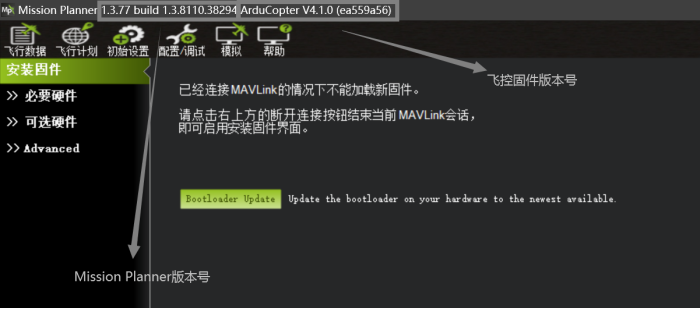
注意看,此时地面站软件的窗口标题栏中会额外显示当前飞控固件的版本号,可供我们随时查看。
三、参数写入
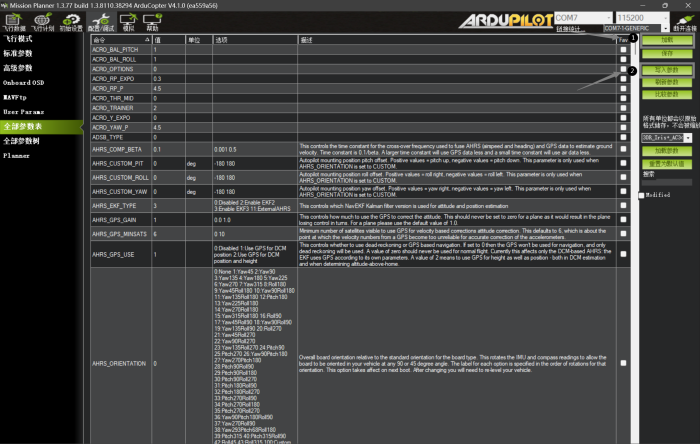
为了使飞控调试更加快捷准确,我们可以事先将表现良好的飞控参数保存为参数文件,以便为每一个飞控配置相同的参数。这里可以直接选择“加载”,选择本地保存的参数文件,如弹出弹窗则选择YES或者OK,确认文件中的参数已经导入至参数列表中后,点击“写入参数”,参数就被写入飞控。

四、校准传感器
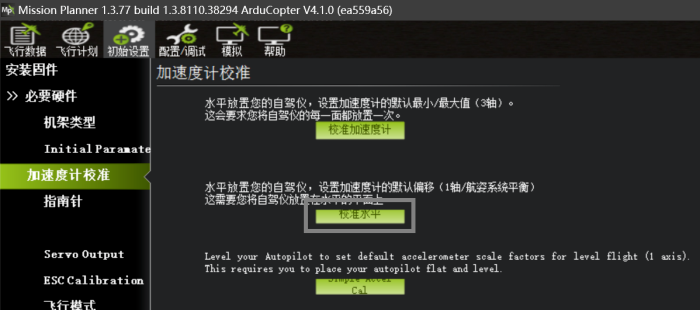
1、加速度计校准
点击“校准加速度计”,开始校准加速度计,根据“Please place vehicle ***”的提示,依次将无人机调整至相应的姿态并保持,然后点击“完成时点击”。
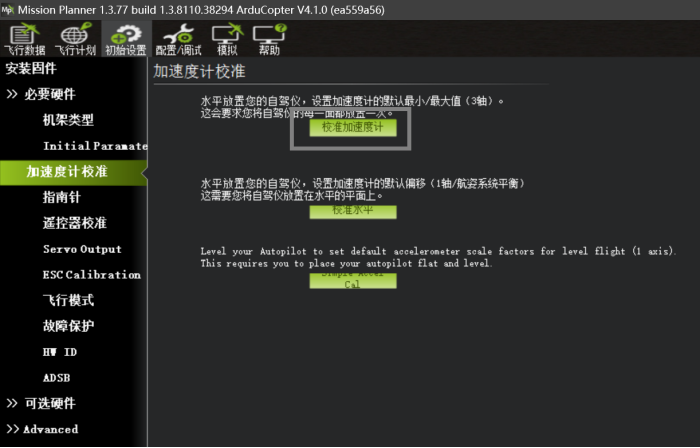
注意:水平放置无人机时,要保证无人机飞控正面的箭头指向正前方,后续加速度计校准过程中调整无人机姿态均以该初始方向为基准。其中,LEVEL表示无人机正常水平放置,LEFT表示无人机向左竖直放置,RIGHT表示无人机向右竖直放置,NOSEDOWN表示无人机机头朝下竖直放置,NOSEUP表示无人机机头朝上竖直放置,BACK表示无人机180°翻转机底朝上水平放置。

加速度计校准成功后,会显示“Calibration successful”的字样,然后保持无人机水平放置,点击下方的“校准水平”,一段时间后“ 校准水平 ”变为“ 完成 ”。至此,加速度计校准完毕。
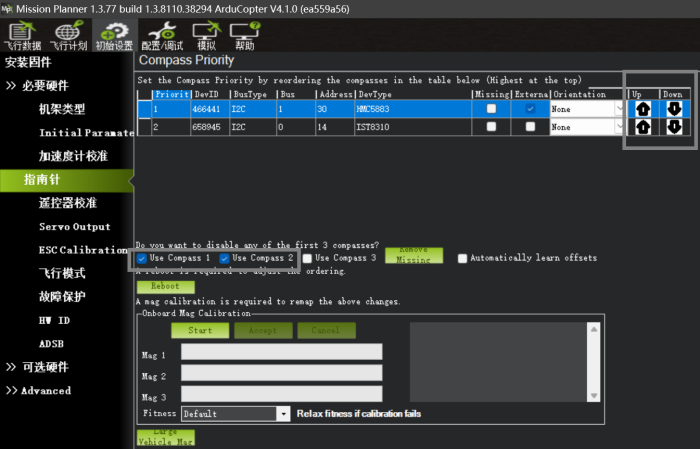
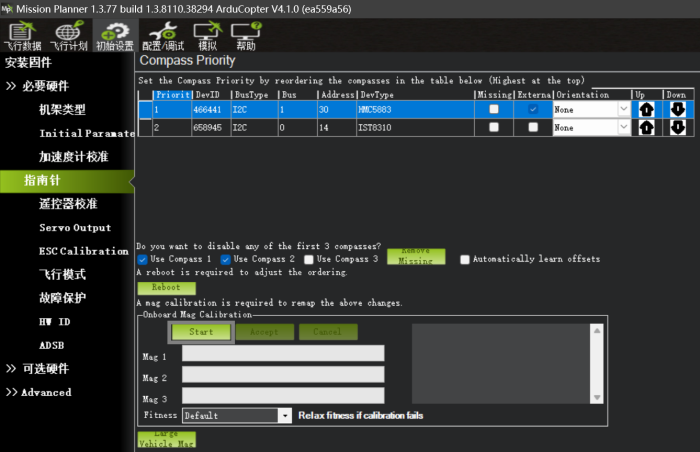
2、指南针校准
如下图所示,地面站识别出当前飞控接有两个电子罗盘,列表中会给出各个电子罗盘的相关信息。其中,“External”项有标识表示电子罗盘为外置罗盘(即GPS),没有标识的则为内置罗盘。这里我们同时启用内置和外置罗盘,而且考虑到外置罗盘不容易受干扰,相较内置罗盘更加稳定,因此设置外置罗盘的优先级高于内置罗盘。
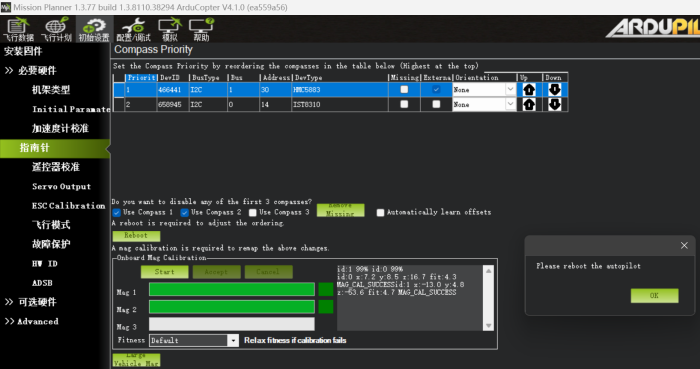
接下来点击“Start”开始校准罗盘(磁力计),将无人机提起进行360°全方位旋转,以使无人机每一侧(前,后,左,右,顶部和底部)向下指向地球几秒钟。校准成功后,可以得到磁力计校准的偏移量信息,校准的进度条右侧会出现绿色色块,表示校准状况良好。校准完成后,根据弹框的提示重启飞控,就完成了飞控罗盘的校准。
五、遥控器刷机
这里笔者选用的遥控器为FLY SKY的FS-i6遥控器,用户手册和快速入门指南可从官网(https://www.flysky-cn.com/fsi6)下载。官方默认的遥控器为6通道,通过固件升级可以将遥控器改为10通道。
刷机用到的程序:
https://github.com/benb0jangles/FlySky-i6-Mod-/tree/master/10ch%20Mod%20i6%20Updater/10ch_MOD_i6_Programmer_V1_5
刷机操作教程:
https://intofpv.com/t-easy-flysky-fs-i6-10-channel-upgrade
六、遥控器校准
1. 遥控器对码
选用的接收机为FLY SKY的FS-iA6接收机,该接收机与FLY SKY的FS-i6遥控器发射机在出厂前已对码成功。这里给大家简单介绍下对码的步骤:
(1)将对码线连接到接收机上的B/VCC接口,即将接收机B/VCC接口处最左侧与最右侧的接线端短接起来,如下图所示。

(2)按住遥控器左下角的“BIND KEY”键(对码键),开启遥控器,遥控器进入对码模式,屏幕上显示“RXBinding..”字样,此时可以松开“BIND KEY”键。
(3)给连接接收机的飞控供电,即将飞控电源线连接到接收机上任意其他接口(CHx)并为飞控上电,接收机上电进入对码模式。当对码模式下的遥控器搜索到同处于对码模式的接收机,发射机和接收机开始对码,对码成功后遥控器界面上闪过提示“RXBinding OK”,说明对码成功。对码成功后,断开接收机电源,拔掉对码线(B/VCC接口处的短接线),接收机再次上电,查看是否对码成功(遥控器主界面是否显示出IntV1和RX的电量)。
注意:此步骤适用于FS-i6发射机与FS-iA6的接收机对码,如使用其他产品,请参考对应产品的说明书进行对码操作。
2. 遥控器设置
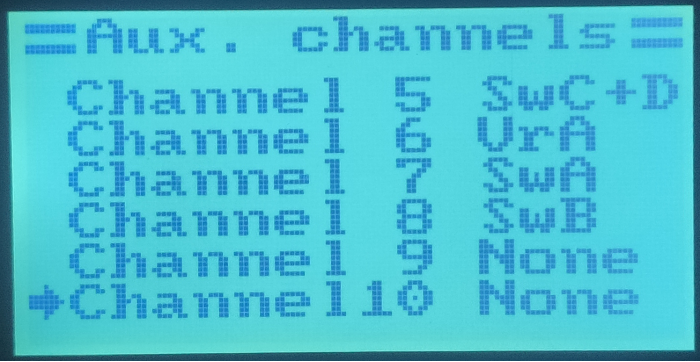
长按OK键进入菜单,选择第二个图标(Functions setup),按OK进入。在新出现的界面中选择Aux. channels并进入,在AUX. . channels选项里面,将各通道设置为下图所示。设置完毕后,需长按遥控器CANCEL键方可保存修改,并退出。
-
5通道用SWC和SWD开关控制,搭配形成6种飞行模式;
-
6通道用VRA旋钮控制,用于控制云台俯仰角度(预留);
-
7通道用SWA开关控制,用于切换有头模式(1挡)和无头模式(2挡);
-
8通道用SWB开关控制,用于控制相机拍照(预留)。
同样在Functions setup下的End points中设置舵量,将5通道高低舵量设置为70%。将第3通道设置成109%(注意:箭头位置是通过SWC和SWD开关拨动高低档位调整),修改完毕后长按CANCEL键保存退出。
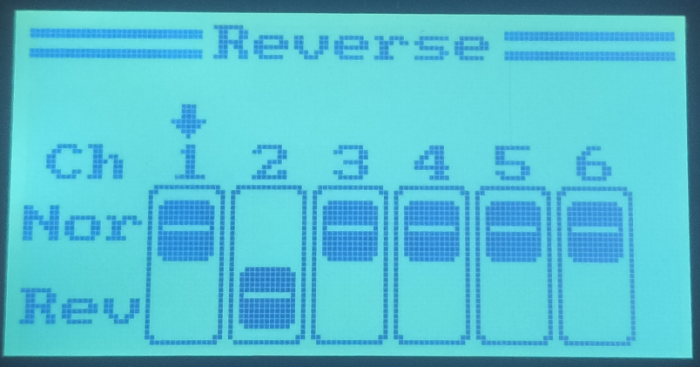
进入Functions setup下的End points,将2通道设为往下,然后长按CANCEL键保存退出。
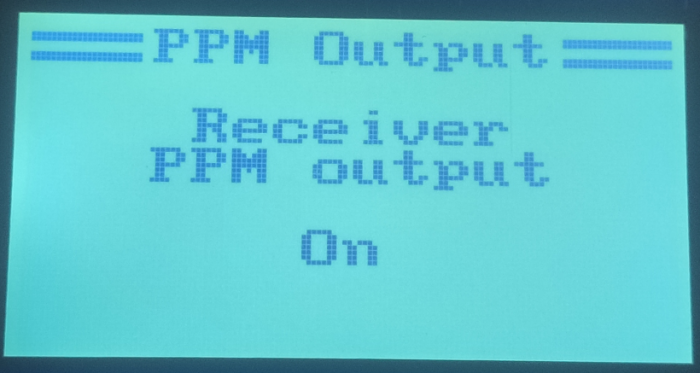
返回主菜单,进入第一个图标(System setup)。依次进入RX Setup→PPM output,将PPM输出设置为ON,如下图所示,这样就开启了PPM输出。长按CANCEL保存退出。
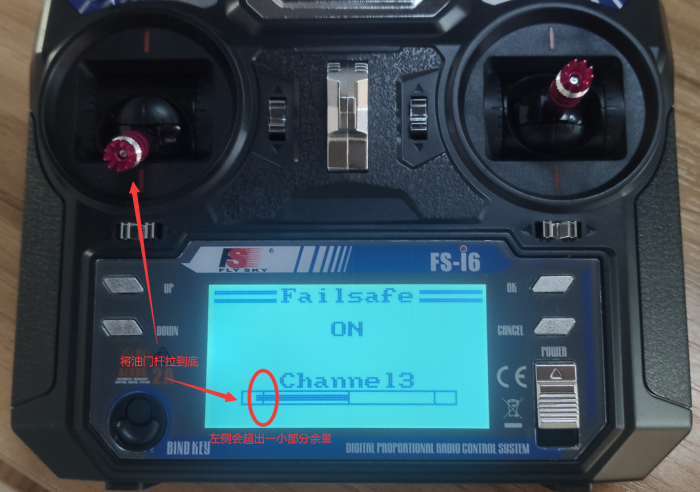
进入RX Setup→Failsafe→Channel3,把3通道打开,保证油门摇杆拉到底,如下图所示,长按CANCEL保存退出。
接着进入Channel5,将飞行模式切换到返航模式,即SWC拨至3 ,SWD拨至1,如下图所示,长按CANCEL保存退出。

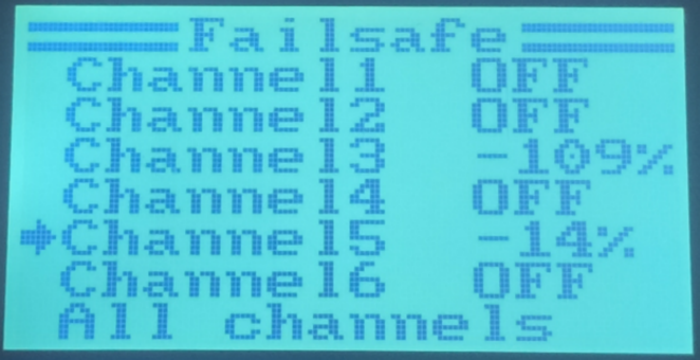
上述通道修改完成后的Failsafe界面如下图所示。注意此时仍需要再次长按CANCEL,才能保存以上两通道的失效安全设置。
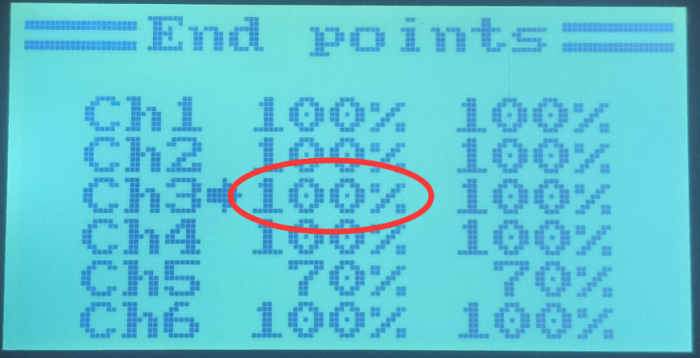
设置完成后,务必记得回到Functions setup→End points,将3通道中的109%改回100%,如下图所示。否则飞控将一直处于失控保护状态,无法解锁。修改完成后长按CANCEL保存退出。
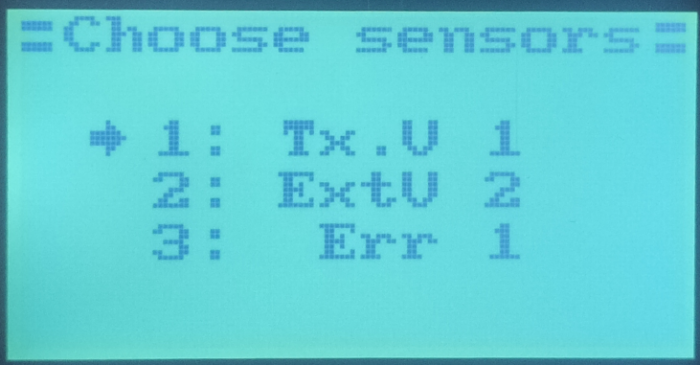
进入System setup→RX Setup→Choose sensors,将传感器设置为下图所示。长按CANCEL保存退出。
进入System setup→RX Setup→RX Battery,根据所用电池类型设置低电压警报。这里选用的电池及其部分参数如下图所示。

该电池的电芯数为4,充电截止电压为16.8V,标称电压为14.8V。这里RX Battery界面下的设置如下图所示。其中电池类型选择锂电池,电芯数设为4。电压部分先设置Hi最高电压,设置为电池的满电电压16.8V,然后再设置Al报警电压,最后设置Lo极限电压。括号中的数值表示单片电芯对应的电压值。
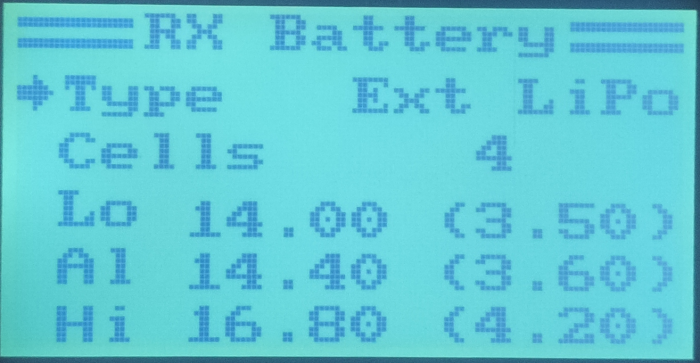
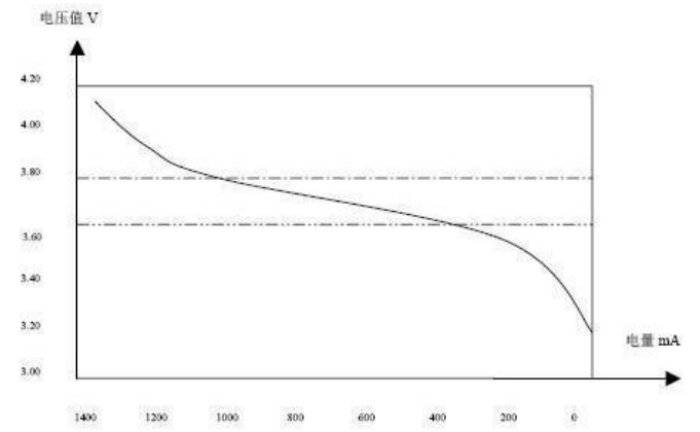
考虑到锂电池放电曲线,将单片电芯的报警电压设为3.6V。如下图所示的锂电池放电曲线,可以看到从4.2V到3.6V,锂电池放电电流为1000mA左右,但是 3.6V 以后可放电量骤减,电压下降速率明显增大。因此在3.6v以下锂电池极易出现过放的情况,所以建议将报警电压设置在3.6V左右,当电压接近报警电压时应该尽快返航降落,以防止电池因过放导致报废。
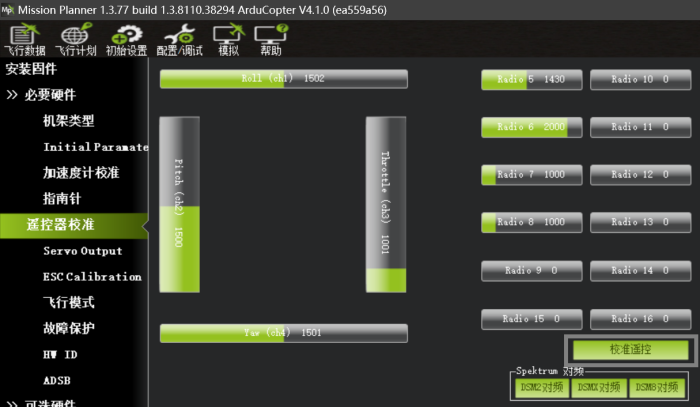
3. 遥控器校准
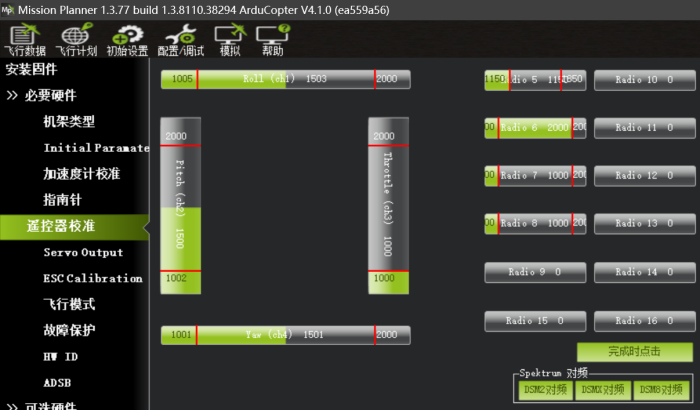
在地面站中开始校准遥控器,点击“校准遥控”。(注意:如果通道里没有绿色显示,说明接收机信号没有传输到飞控,请检查飞控与接收机的接线,或检查遥控器是否是PPM模式输出。)
点击“校准遥控”后,会出现如下弹框,提示确保发射机已开启且接收机已上电并连接飞控,同时确保无人机电机未供电或未安装螺旋桨。保证无误后可点击“OK ”。
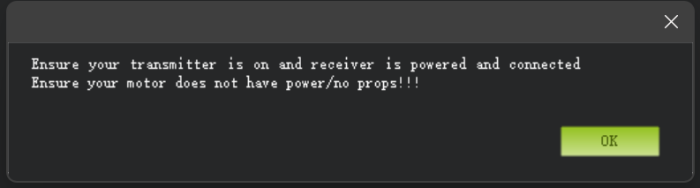
紧接着会出现一个新弹框,提示在遥控器校准过程中移动所有的拨杆和摇杆,以使得它们都达到其极限位置。点击“OK”开始。
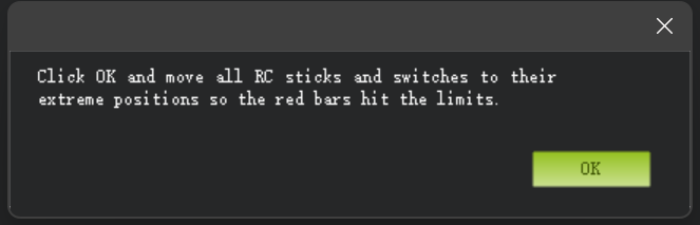
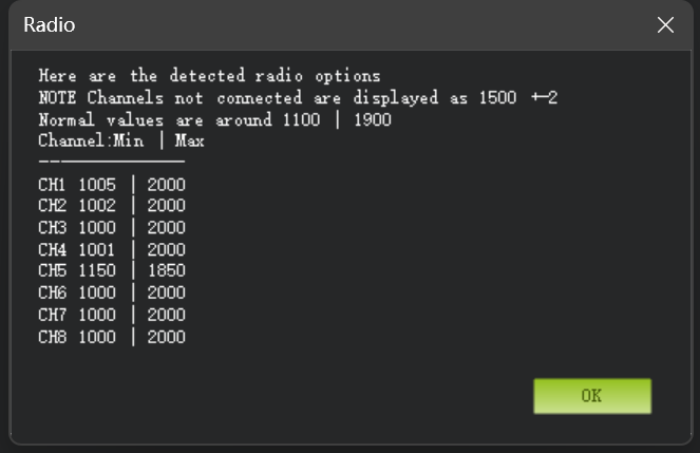
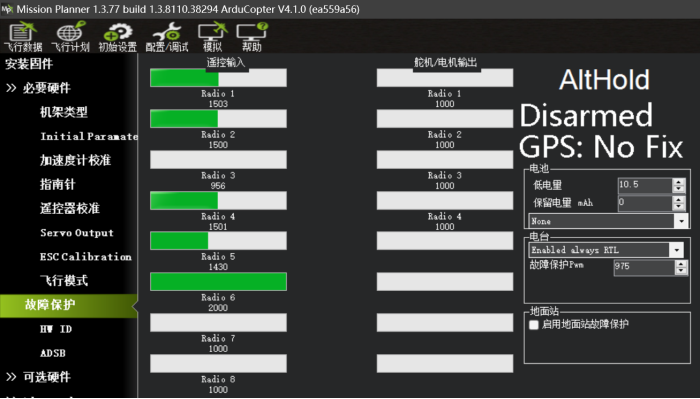
将遥控器左右两边摇杆上下左右均推到最大,使每个通道的红色提示条移动到上下限的位置,并且四个通道的最大值和最小值都应该分别相近。接下来拨动SWC和SWD开关,查看对应5通道是否动作;拨动VRA旋钮开关,查看对应的6通道是否动作;拨动SWA开关,查看对应7通道是否动作;拨动SWB开关,查看对应8通道是否动作。若上述通道动作没有问题,就可以点击“完成时点击”。紧接着将会出现弹框显示以下遥控器校准信息:若想要检测以上设置是否正确,可将遥控器关闭,进入地面站“故障保护”界面,观察第3通道输入量是否在975以下,飞行模式是否自动切换至返航模式(观察5通道),即观察是否触发失效保护。
七、飞行模式
飞控载入参数后,飞行模式就已经自动设定完毕,这里只需要检查一下地面站软件中飞行模式的设置是否与下图所示一致。

上图所示的飞行模式从上到下依次表示定高模式、悬停模式、返航模式、降落模式、绕圈模式、自稳模式。
-
定高模式:飞控会自动保持当前高度,而且还可以手动对横滚、俯仰、方向的控制。
-
悬停模式:飞行器会自动保持当前位置、方向和高度。
-
返航模式:飞行器会从当前位置飞到home点上方悬停。
-
降落模式:飞行器垂直下降,且下降至10m的过程中(或是直到声呐检测到了飞行器下面有东西之前)使用常规定高控制器,通过WPNAV_SPEED_DN参数限制下降速度。
-
绕圈模式:飞行器会开始以一定半径绕圈飞行,机头朝向中点。
-
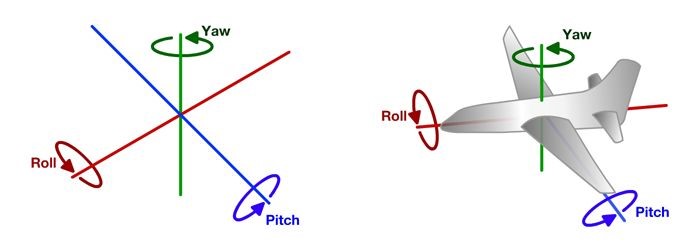
自稳模式:用roll与pitch操作控制飞行器的倾斜角度。当松开roll与pitch摇杆时,飞行器将会自动水平。
关于飞行模式的详细介绍可参见:
https://doc.cuav.net/tutorial/copter/flight-modes/alt-hold.html
八、电池校准
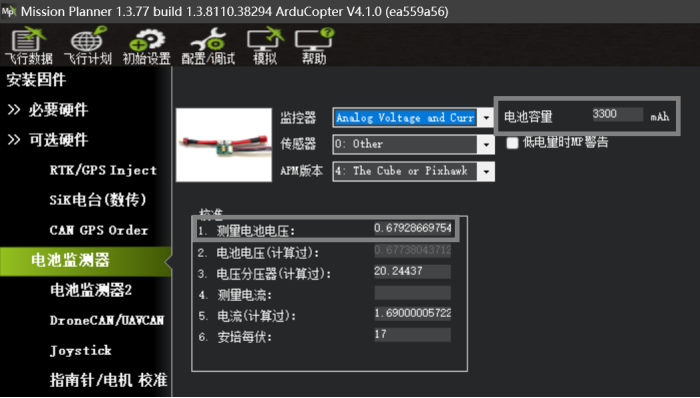
先用测电器测量电池的电压,保持飞控与地面站连接,用电池给无人机供电,然后在下图所示的界面内修改电池容量和测量电池电压。如这里选用为无人机供电的电池容量为3300mAh,因此需要将“电池容量”栏中的值改为3300。且先前测量电池电压为16.7V,接下来还需在“测量电池电压”一栏中将数值改为16.7,回车,待“电池电压(计算过)”的数值与“测量电池电压”的数值相近后直接退出当前界面即可。
九、电调校准
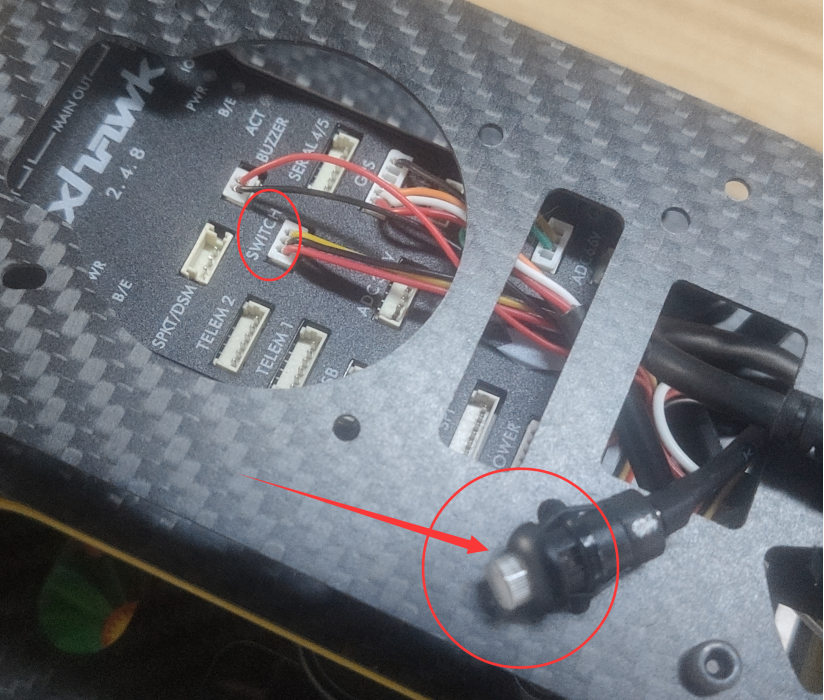
飞控断电,打开遥控器,油门推到最高位后将飞控接上电池。待飞控启动成功后,飞控灯红绿蓝闪烁,两秒后断开电池,三秒后再插上电池。飞控灯红绿蓝快速闪烁,按下安全开关。安全开关的位置见下图箭头所指,它连接着飞控上的SWITCH接口。
进入电调校准,听到一段音效后,将油门拉到最低位。待音效声消失后,慢慢往上推动油门,查看电机转向,电机转速是否同步,反馈是否正常。若电机转动正常,则电调校准完毕。