
pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO

最流行的开源飞控项目ArduPilot Mega(APM)介绍及发展历史
ArduPilotMega ( APM ) 是市面上最强大的基于惯性导航的开源自驾仪 特性包括: 免费开源固件,支持飞机("ArduPlane"),多旋翼 (四旋翼, 六旋翼, 八旋翼等), 直升机("ArduCopter")和地面车辆("ArduRover")! 通过点击式的工具简单设置和上传固件。无须编程!(但是你想搞搞代码的话,可以使用简单的嵌入式编程工具: Arduino) 通过点击式的桌面程序完全的规划任务脚本 可以支持上百个三维航点 使用强大的 MAV......
【2023-12-17】 详细内容
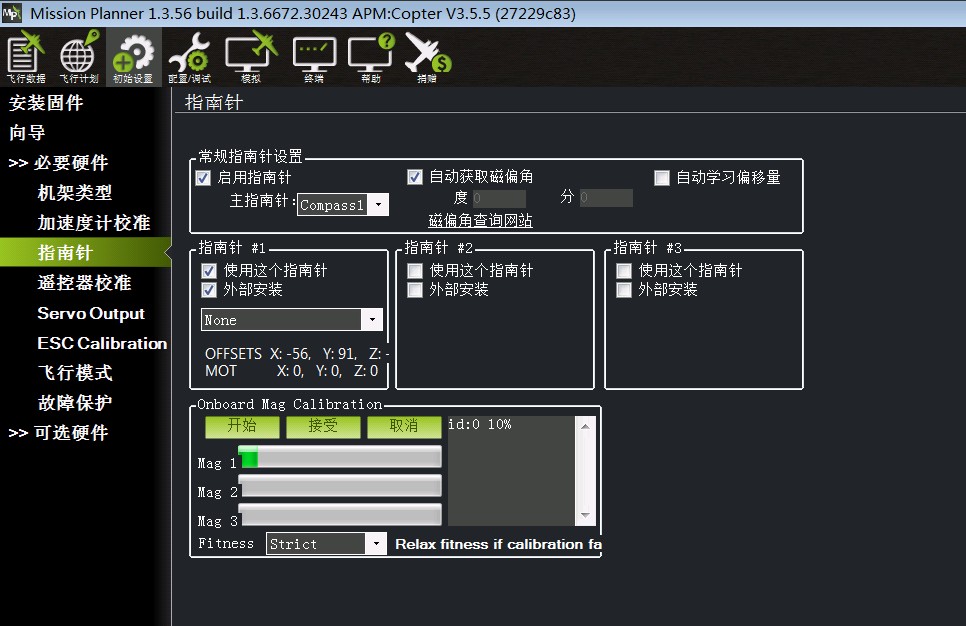
Pixhawk双罗盘校准方法
Pixhawk双罗盘校准方法 1.GPS不可以带电插拔,带电插拔可能会导致GPS模块损坏,无法搜星。不听劝告,后果自负! 2.校准罗盘成功后,飞控要断电重新连接,这步一定要做。 3.如果使用M8N 带IST8310的GPS,必须刷3.5 V3 以上固件,低于3.5或者V2无法识别。 从3.3.3固件开始,飞控支持使用双罗盘(也......
【2023-12-10】 详细内容

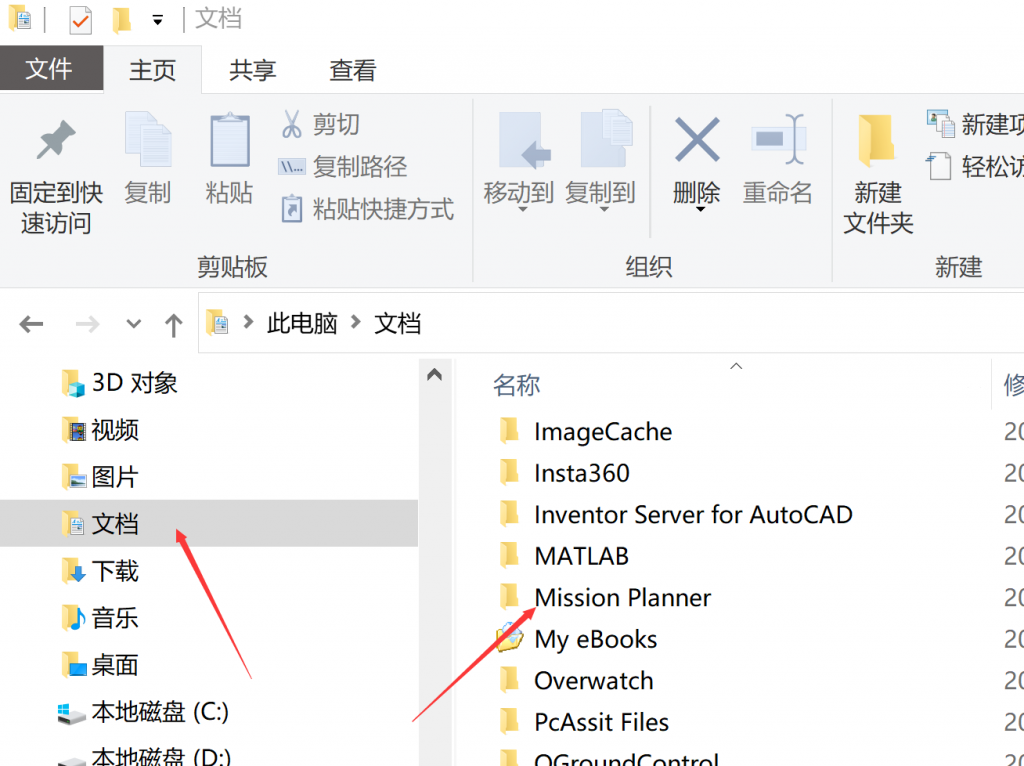
MissionPlanner使用说明(一些比较难找的功能))
MissionPlanner有些功能需要自己摸索,我把一些比较难找的功能使用方法列举如下: 无人机调试,飞控硬件定制,固件修改,log日志分析,飞控驱动添加请QQ联系:3500985284 经过三个月的制作,我的《无人机飞控固件开发教程》系列视频终于在“网易云课堂”上线了,本教程基于APM固件和Pixhawk硬件,讲述如何搭建飞控固件开发环境、如何编译烧写固件、如何修改固件、如何建立飞控仿真环境、如何添加自定义信息、自定义日志、如何添加外设驱动程序、如何使用OpenMV图像识别设备引导飞机飞行......
【2023-11-23】 详细内容
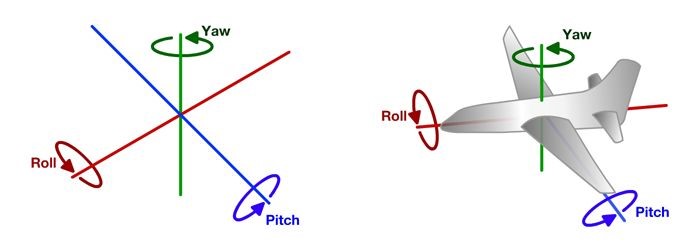
飞控不同姿态安装设置和校准说明
在此之前先了解下姿态角(Roll、Pitch、Yaw),如下图所示 1、俯仰角θ(pitch):围绕X轴旋转的。 2、偏航角ψ(yaw):围绕Z轴旋转的角度。 3、滚转角Φ(roll):围绕Y轴旋转的角度。 一般我们在安装PIXHAWK和MINIPIX飞控系统的时候都是使用它默认参数,正常安装如下图所示 连接地面站可以看到此时的水平面和姿态是正常的 但是有的飞机,特别是直升机,没有足够的水平......
【2023-11-18】 详细内容
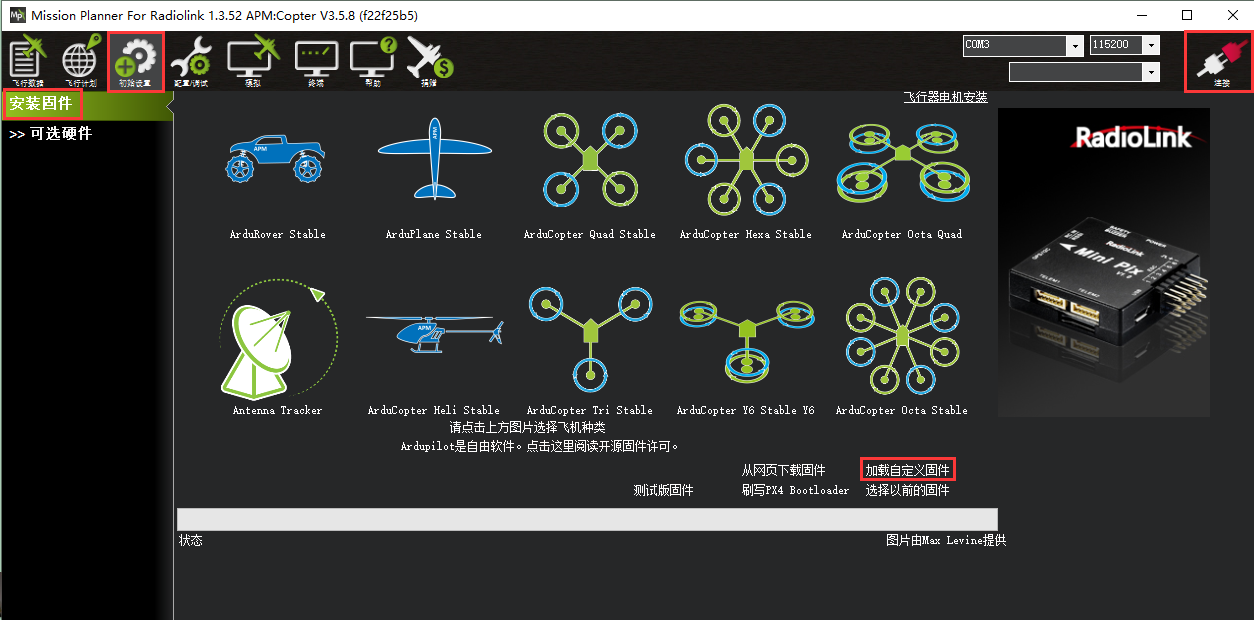
pix飞控调试教程-如何安装参数保密固件
通过刷写参数保护固件,对设置好的PID参数进行加密保护,整机厂家可无忧完成整机批量生产 注意: ①该固件目前仅支持V1.2或者V1.0版本的MiniPix飞控 ②该固件目前仅适用于多旋翼机型 PID
【2023-11-18】 详细内容

PixHawk飞控和Mission Planner地面站安装调试3dr数传连接
PixHawk是著名飞控厂商3DR推出的新一代独立、开源、高效的飞行控制器,前身为APM飞控,不仅提供了丰富的外设模块和可靠的飞行体验,有能力的爱好者还可在其基础上进行二次开发。第一次使用需要多方查
【2023-11-12】 详细内容
APM(pixhawk)飞控疑难杂症解决方法汇总(持续更新)
一、无法解锁(黄灯闪烁) 无法解锁的原因会有多种,一般情况下,飞控会在你尝试解锁时把拒绝解锁的原因在地面站MissionPlanner的姿态窗口中显示(英文的,并且包含了不少简称)
【2023-11-12】 详细内容

ArduPilot 软件在环仿真SITL(SITL+Mission Planner)
说明: 介绍如何搭建windows下无人机软件在环仿真(SITL)仿真环境
【2023-10-29】 详细内容

航点规划-模拟器
说明: 介绍如何在Mission Planner软件使用模拟器来模拟航点规划 Mission Planner自带有仿真功能,可以进行离线测试 航线如果是任务前预规划,可以实现模拟飞行一次以便检验飞行参数与拍照定位是否正确
【2023-10-29】 详细内容
航点规划-航点命令
航点信息和命令
【2023-10-29】 详细内容
