
pixhawkpro
Pixhawk PRO

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Pixhawk PRO
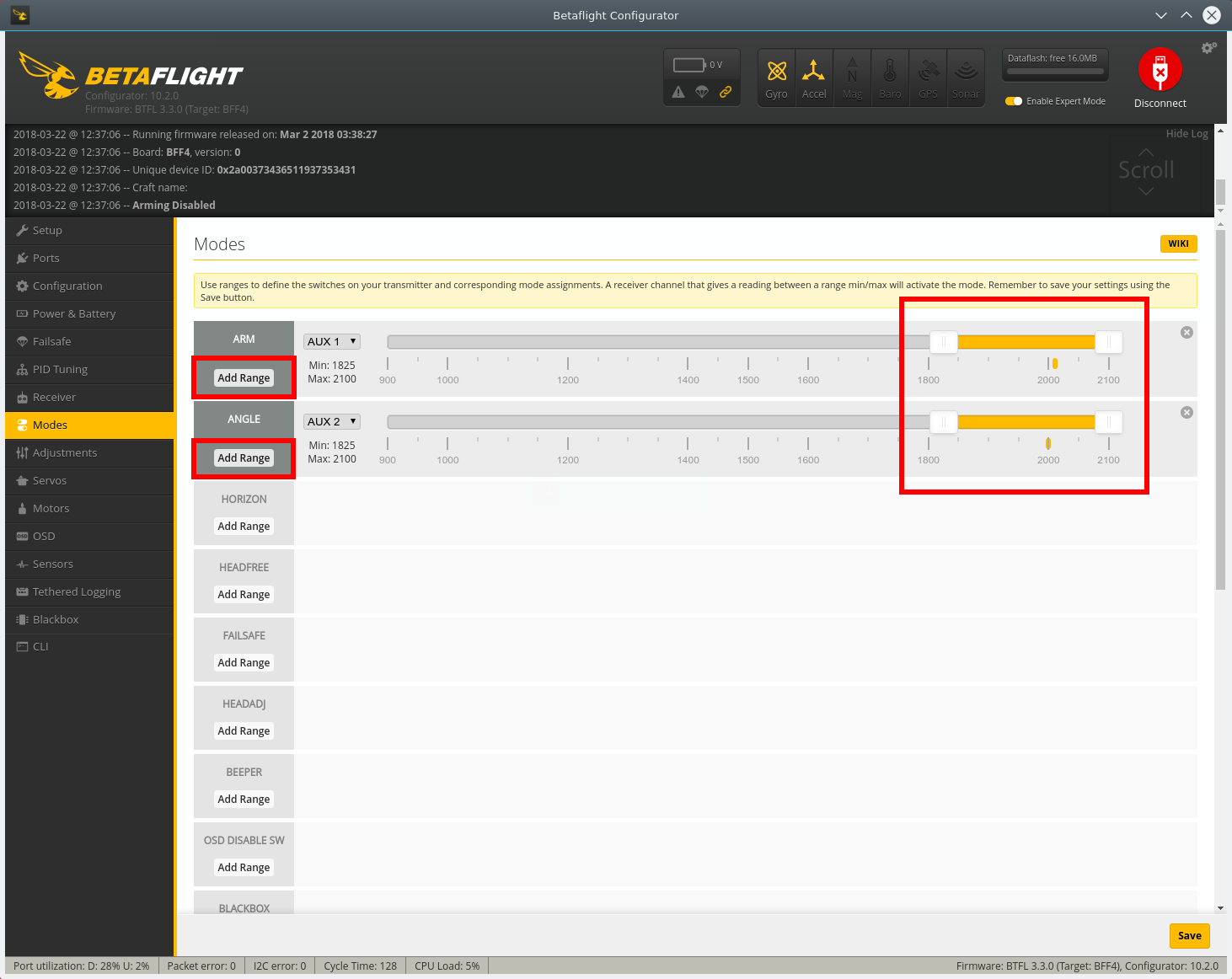
穿越机Betaflight调试教程 | 穿越机飞行模式解释,FPV飞行模式设置
飞行模式专业术语解释 Arm解锁 解锁模式。用于设置穿越机何时启动,一旦解锁,四个电机就会开始转动。 Horizon自稳 自稳模式。在该模式下,穿越机起飞后会自动保持水平(注意,油门需要你自己控制,否则会出现青蛙跳)新手的话建议从这个模式开始学习。可以训练飞机的操控感。 Angle半自稳 半自稳模式。这个模式下飞机也会保持平衡,不过跟自稳模式有一点区别,这个模式下你可以让飞机空翻(空中翻转180度),不过这个不太建议你尝试,有一定危险性。 ......
【2024-01-02】 详细内容
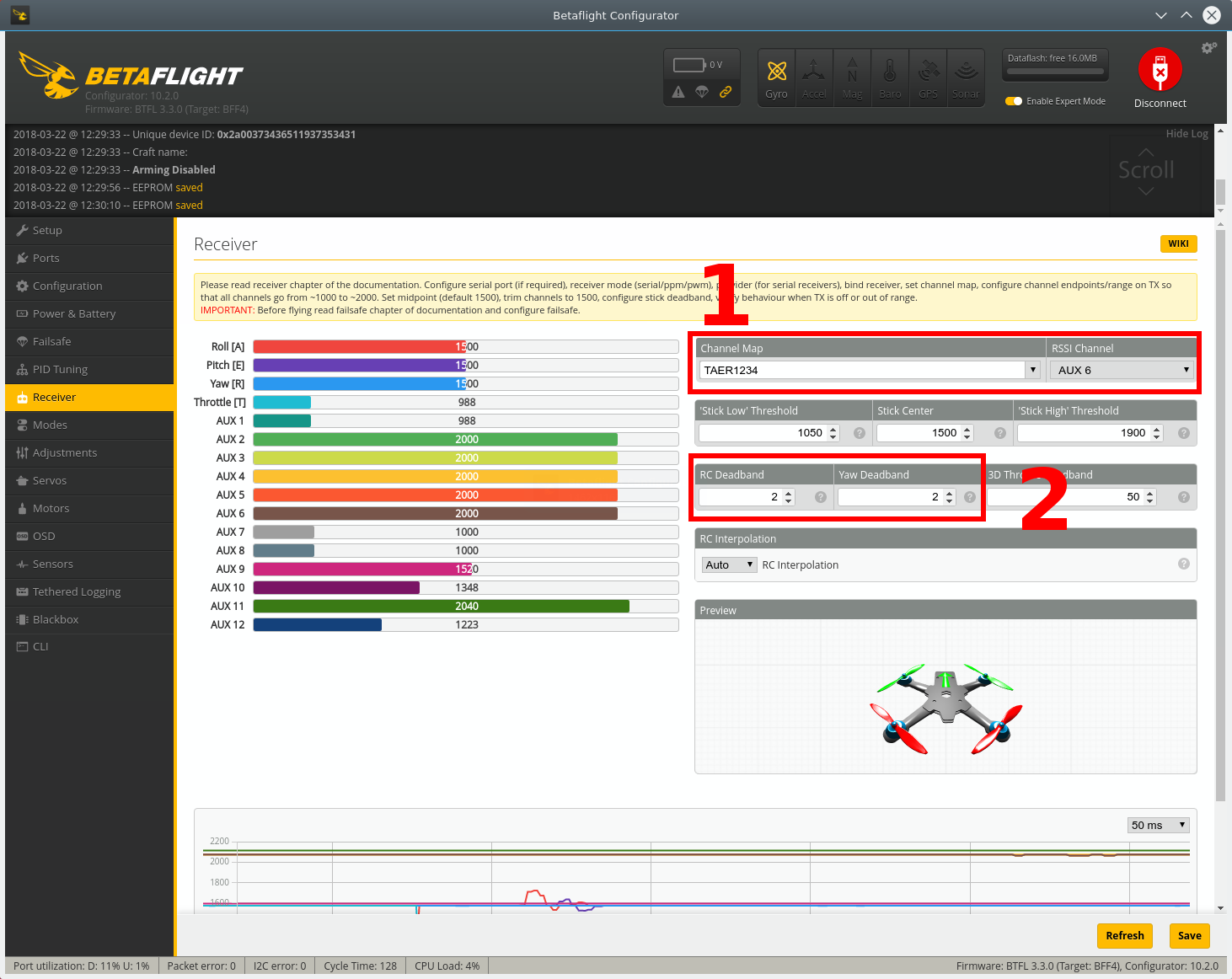
穿越机Betaflight调试教程 | 电池电压设置,遥控器设置
电池与性能 现在很多飞控都内置PDB(Power Distribute Board)分电板,它能够自动获取电池电压和当前的电流读数。但这些特性在BetaFlight中都被默认关闭了,你可以在【电池】选项卡里面打开这个选项—在下拉框中选择ONBOARD ADC。但是有一种例外情况,那就是如果你把电池电压选项通过遥控器显示,那么这个选项就不生效。关于如何在遥控器里查看电池和电压,可以关注FPV One查看。电池电压与电流具体值取决于你的实际情况,一半在电池的外表皮上面可以看到。如果你不清楚如何设置......
【2024-01-02】 详细内容
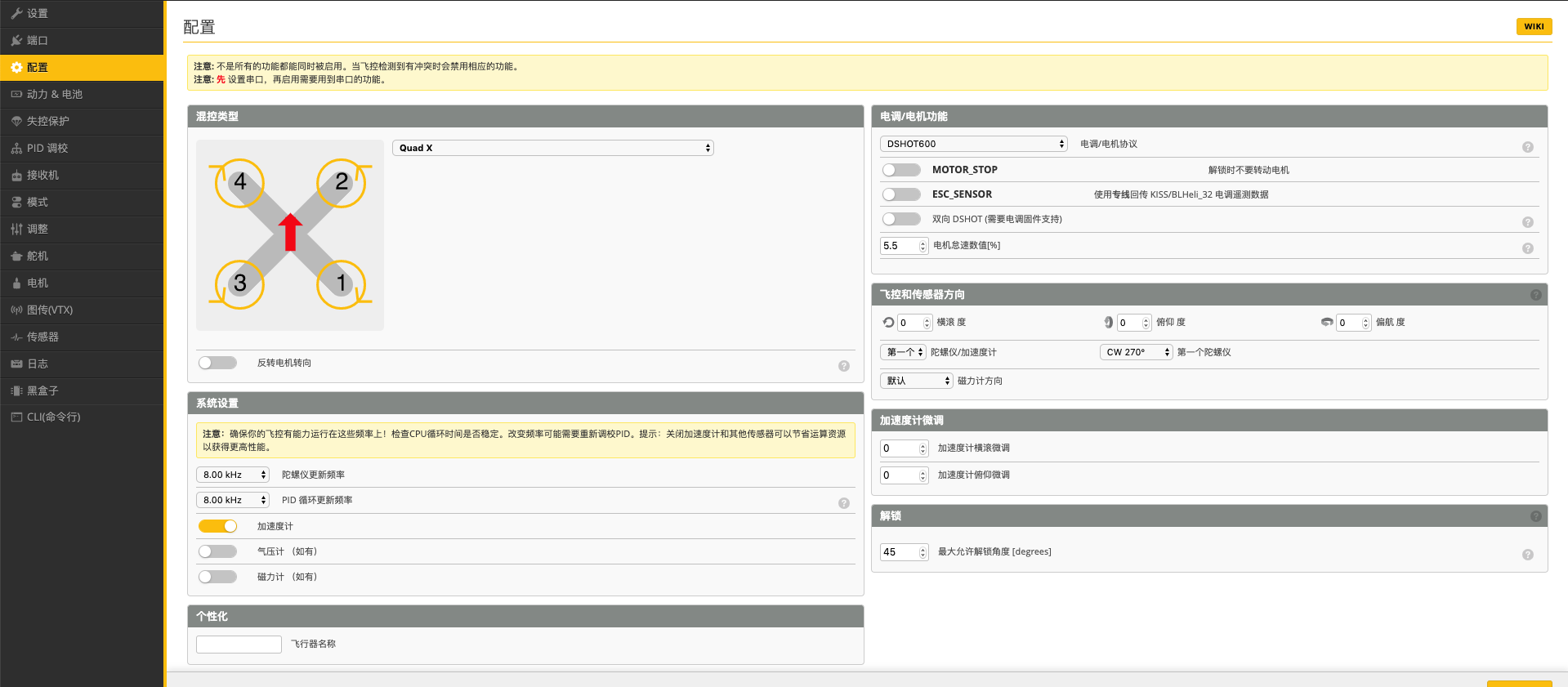
穿越机Betaflight调试教程 | 地面站下载与安装,端口配置,地面站设置
写在前面:下文的调试建立在你的飞机已经可以飞的基础上,不包含Betaflight的基本配置,而是着重说明了Betaflight新版本的特性,旨在让你的飞机飞得更好。如果你是第一次接触Betaflight,请先在别处找资料完成Betaflight的基本配置。本文推荐给有一定经验的玩家来帮助他们发挥出飞行器的最大潜力。后续也会有写给小白的从零开始的Betaflight配置教程,感兴趣的不妨点个关注。 注意:在执行任何操作之前,小哥建议您进行备份。这您可以在有任何操作失误之后重新恢复到之前的版本,因......
【2024-01-02】 详细内容

Betaflight日志分析软件:BlackBoxExplorer 3.5.0 下载 版本说明 Blackbox Log Viewer 的此更新增加了对由最新版本的 Betaflight 固件 (4
Betaflight日志分析软件:BlackBoxExplorer 3.5.0 下载 版本说明Blackbox Log Viewer 的此更新增加了对由最新版本的 Betaflight 固件 (4.2) 写入的日志的支持。 改进:添加了对图表进行“截图”的功能添加了隐藏图形背景和时间条的选项添加了新的 PID 误差与设定值图各种 UI 改进 修复:修复了标题显示中的错误修复了与固件的一些不兼容问题。 Windows版本:下载链接1 Mac版本:下载链接2......
【2024-01-02】 详细内容

FPV穿越机组装到起飞全流程教程,0基础学会
......
【2024-01-02】 详细内容
看完这个视频的人都会组装穿越机了,手把手教学,化骨龙套机装机教程
......
【2024-01-02】 详细内容
PIXHAWK2.4.8调试教程
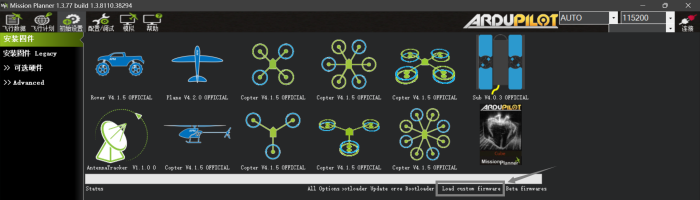
一、加载固件首先我们打开Mission Planner地面站软件,用micro USB数据线将无人机飞控和PC连接起来。进入地面站的“初始设置”界面,选择“安装固件”选项,加载我们事先准备好的自定义固件。 载入固件文件后,根据弹出的窗口提示,先断开飞控与PC的连接,然后点击“OK”后再重新将飞控与PC进行连接。 当PC识别到飞控后,地面站开始将固件加载到飞控。当进度条满格并出现“Upload Done”字样,同时飞控伴随出现一段音效提示,说明此时固件已经成功加载到飞控。 二、飞控连接 打开W......
【2024-01-01】 详细内容
固定翼上使用iNav(inavflight)的基本步骤
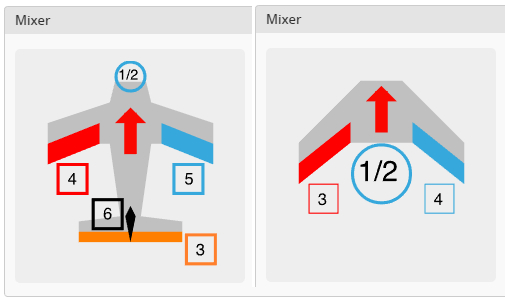
注意:使用1.6版本以下(inav/cleanflight/betaflight)固件的F3飞控或相同处理器的飞控,飞行时间不能超过1小时15分钟,1.6以上无此限制。 1):飞控准备 用iNav配置软件(地面站)刷写最新固件;对所有传感器校准,这一步不能少;在预设菜单项中选择匹配的预设机型。 2)舵机/电机飞控的连接 下图是飞机(左边),固定翼(右边)的舵机/电机位置图,舵机和电调/电机(记住:舵机的正极请接BEC不要接飞控,飞控带不起)飞机1号位 电机......
【2023-12-31】 详细内容
把树莓派当作无人机的数传和图传
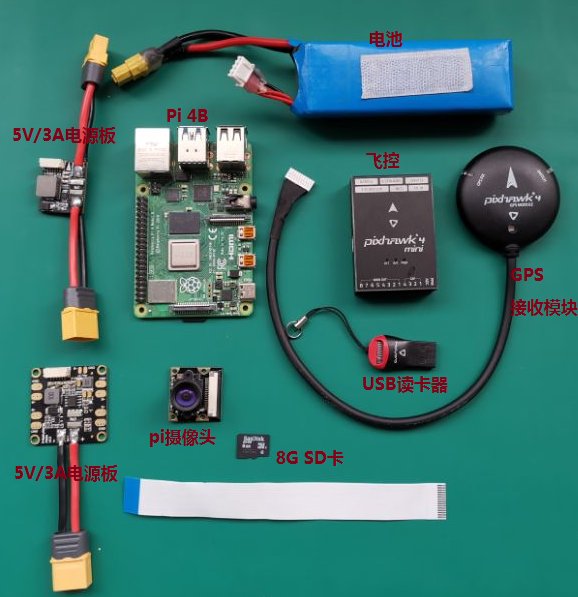
使用树莓派作为数传和图传,把飞控的遥测(Mavlink)数据和摄像头视频通过WIFI网络转送到远端的地面站。这种应用方式是基于Rpanion-server软件实现的。 Rpanion-server是一款开源软件,可以安装在任何具有Linux(或者基于Linux开发的操作系统,如Ubuntu,raspberry)操作系统的电脑上,它提供了一个基于Web的界面,在界面上可以配置树莓派网络、遥测路由参数、摄像头视频参数和从连接的飞行控制器进行日志记录。在树莓派上安装了这个软件之后,你可以在地面用电脑......
【2023-12-30】 详细内容
在ARDUPILOT旋翼机上安装PX4FLOW光流传感器
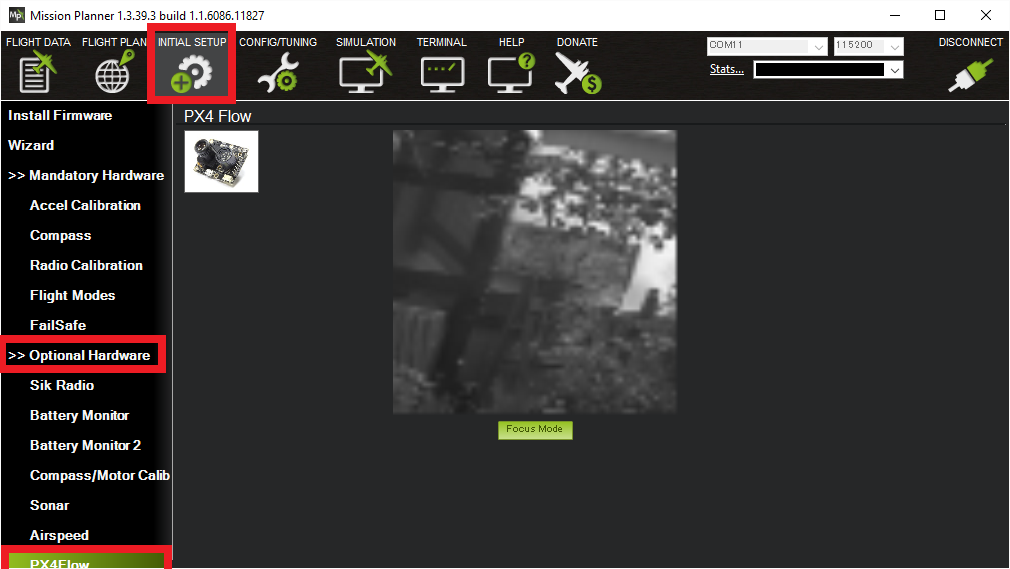
预先要求 在安装和调试光流传感器之前,请先保证: 旋翼机已经安装、调试完毕,至少可以在Stabilize(自稳)和AltHold(定高)模式下稳定飞行。 飞控的固件为Copter-3.3或之后的版本。推荐使用最新的稳定版本。 手上有Maxbotix1043(PX4Flow自带)以外的一款超声波或激光雷达传感器(推荐),或飞控上的6.6V ADC没有被占用(使用PX4Flow自带的MB1043,不推荐)。ArduPilot开发者似乎是在测试中发现MB1043的读数不够稳定,没有支......
【2023-12-30】 详细内容
