pixhawkpro
Multicopter

在各大直播平台搜索“ 跑跑啦航模 “就可以搜到我们啦,欢迎来到跑跑啦航模直播间。
Multicopter
在组装飞机的时候经常会遇到传感器接口和飞控接口不一致的问题,像是GPS、数传、串口、激光定高雷达等非飞控官方出品的传感器就会经常遇到该问题,需要我们根据端口的线序自行更改接口进行连接。为了方便接线,我这里简单记录一下我目前使用过的两款飞控的接线图,省得每次都得找说明书或百度,持续佛系更新。
吐槽:各种传感器都喜欢使用PH2.0、SH1.0、MX1.25、XH2.54等一系列互不兼容的端子线... 各厂家为啥就不能统一下或者多配点不同类型的端子线呢,每次接个线都得浪费一大堆时间。
这里以我的个人经验,简单介绍一下常用传感器都连接飞控的什么端口,需要什么设置。
更多细节内容参考下面的文章
使用TTL转USB模块:Ubuntu读取PixHawk硬件的IMU&GPS数据
直接使用机载电脑的硬件串口(xavier为例):Nvidia Jetson Xavier 安装Ubuntu18.04并配置环境
T265是四旋翼视觉定位常用的定位方案,但是网上对其具体原理的讲解甚少,下文以实物为例演示了视觉定位相关设置及效果,另配有视频讲解合计30min+。跟着文章走一遍,如何轻松学会如何将T265用在PX4实机上。
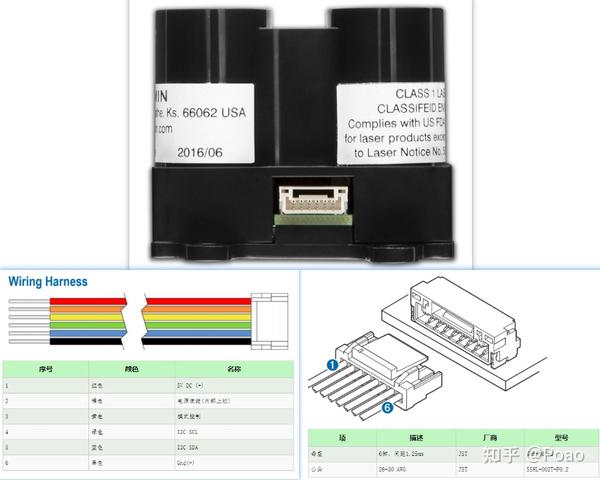
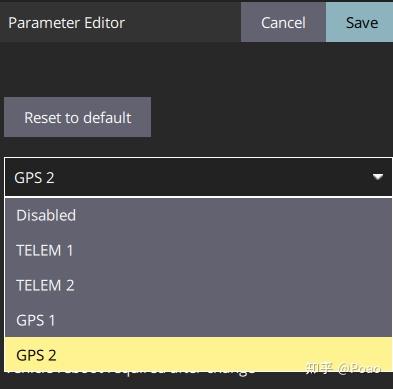
最近一个项目选购的北醒TFmini-Plus,使用V5+飞控(刷的PX4固件),就只能使用UART版本的,IIC版本的目前仅支持刷Ardupilot固件。买前没考虑接口问题,导致后面尝试诸多方法后还是只能换货。UART版本的激光定高雷达可接SERIAL 4(2.4.8),UART 4(v5+)。连接之后,需要额外设置参数。这里简述一下北醒系列UART激光定高雷达的参数设置(V5+,固件版本1.13.2):
最近使用X7+(v1.13.3),其参数SENS_TFMINI_CFG里面没有TELEM4这一选项,可以选择GPS2。见雷迅官网,其UART4可作为GPS2接口。
参数设置后重启生效。打开QGC的Analyze Tools,在Mavlink控制台输入【listener distance_sensor】可以获取到激光定高雷达的数据话题,在Mavlink检测处也可以观察到名为【DISTANCE_SENSOR】的mavlink消息。
北醒雷达的接线线序可以在产品资料中查看,下面是TF-mini S的序,其他应该都是一样的。

再加个LIDAR LITE V3 的使用。PX4参数需要设置 SENS_EN_LL40LS 为 I2C,高度输入选择 Ranger sensor(参数 EKF2_HGT_HOME)。